Hi all - Im trying to build my first PX4 drone (Betaflight user before).
I have a Holybro S500 frame that I have mounted
- Emax MT2216 II 810KV motors
- Emax Bullet 35A ESC
- 6S1P Li-ion battery (4200mAh, 45A peak)
- Pixhawk 6C with M10 GPS
- 1045 propellers
- RP1-V2 ELRS reciver
I am running 1.16.0 rc (Custom firmware with CRSF enabled)
Right now I am trying to get to the “pre-flight” tuning before PID tuning the Pixhawk 6C.
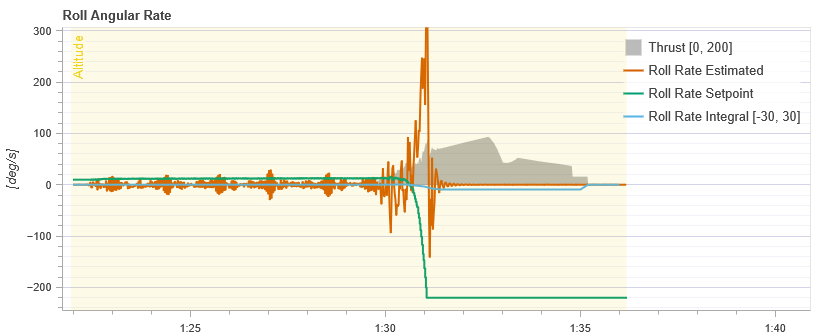
My problem is that whenever I am trying to take off (Stabilized or Altitude mode), the drone just flips/rolls over to the right side each time.
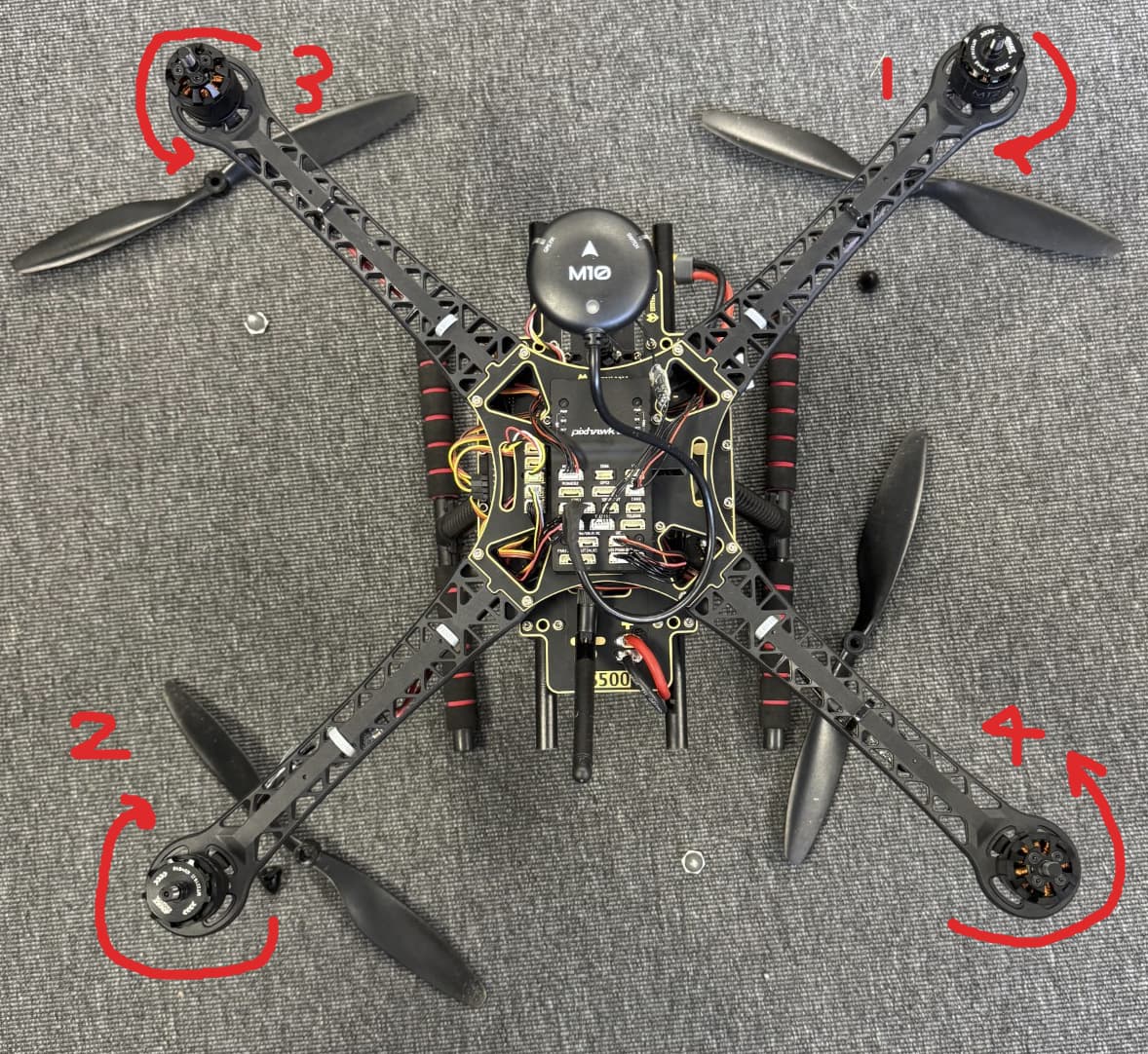
I have calibrated all sensors a few times, I have checked the motors spin and orientation a few times, but it still happens.
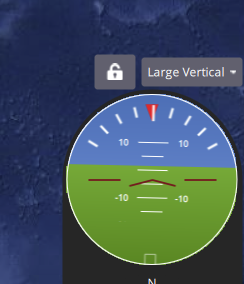
I am checking roll / pitch / yaw orientation using the QGroundControl artifical horizon which responds as I expect
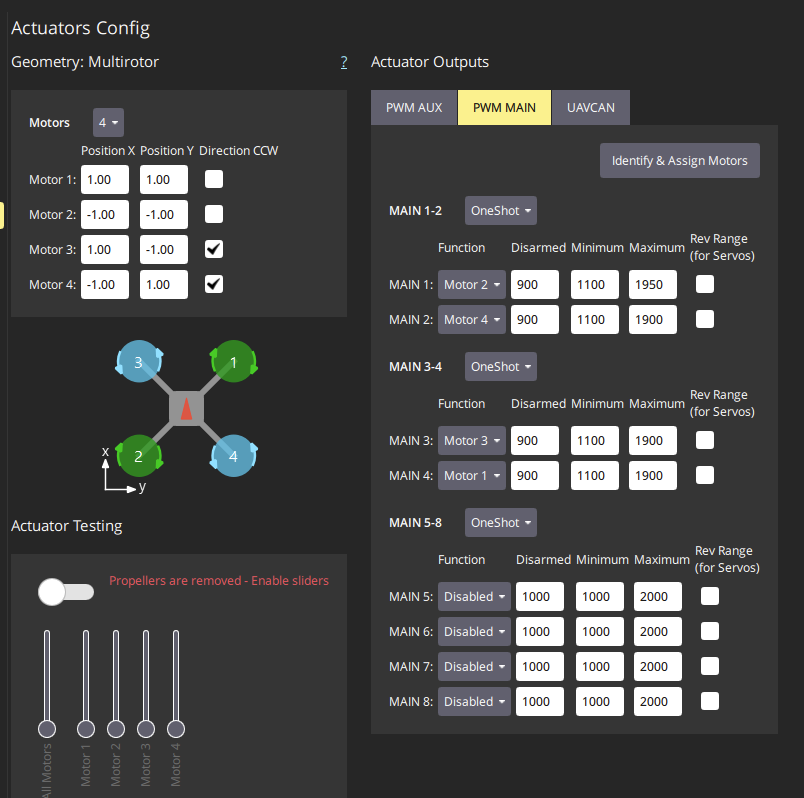
The motors are configured and spins as the labeling says
But it still seems like it is rolling to the wrong side during take off - If I check the log file, I can see the setpoint and estimate are going opposite ways.
So - Motors are spinning as I expect (In Acro, the motor also tilts as I expect with the joystick), sensors are calibrated, no warnings.
Is there anyone who has a suggestion to what could be happening?
Log here:
Any help is appreciated.
I would definitely think it’s something to do with orientation of the Pixhawk or motor setup, as you suspected as well.
Also note that the max PWM for MAIN 1 is higher than MAIN2-4, probably an oversight.
I assume you have verified all motors and directions using the motor test tool?
And does the atificial horizon move correctly when you move the drone?
And have you tried arming without props and holding the frame to check if the correct motors speed up as you tilt it?
Hi Julian, thank you for your reply.
I noticed on the ground some issues where the drone would vibrate quite a bit if I moved the throttle to almost takeoff power - Investigating a bit more led me to checking the motors, and it seems like one of the motors have a defect winding (it was 57mOhm where all other windings for the rest of the motors were 20mOhm).
I have replaced the motors with new ones that seems to solve this issue and it does not flip on it self now. (Now it just shoots up 10 meters when I try to take it up to 1m - after googling a bit I suspect I have to adjust MPC_THR_HOVER to a lower value since I am running a 6S1P any require little throttle to hover)
You can try to adjust the hover throttle yes.
Got it flying with MPC_THR_HOVER at 20% - I think I can set it a bit higher, but it took off after giving it a little extra throttle.
I would say that it is not flying stable enough for PID tuning yet, but it is a start. I also mounted the H-Flow optical flow sensor, and I can see that sensor is working  Now I just have to tune a few parameters before PID tuning I guess? My first guess is looking at the
Now I just have to tune a few parameters before PID tuning I guess? My first guess is looking at the MC_[ROLL|PITCH|YAW]RATE_K