Hello, I am currently working on a drone setup using a Raspberry Pi-based Pilot Pi with PX4. You may refer to my previous discussions for additional background. PX4 EKF2 Heading Instability Issue
The system reaches the “Ready to Fly” state without any errors. However, when I arm the vehicle and initiate takeoff, the drone briefly lifts off but immediately flips over and crashes.
I suspect there may be an issue related to motor/propeller configuration, orientation, or control output. The direction was verified by removing the propeller from the motor and touching it directly by hand.
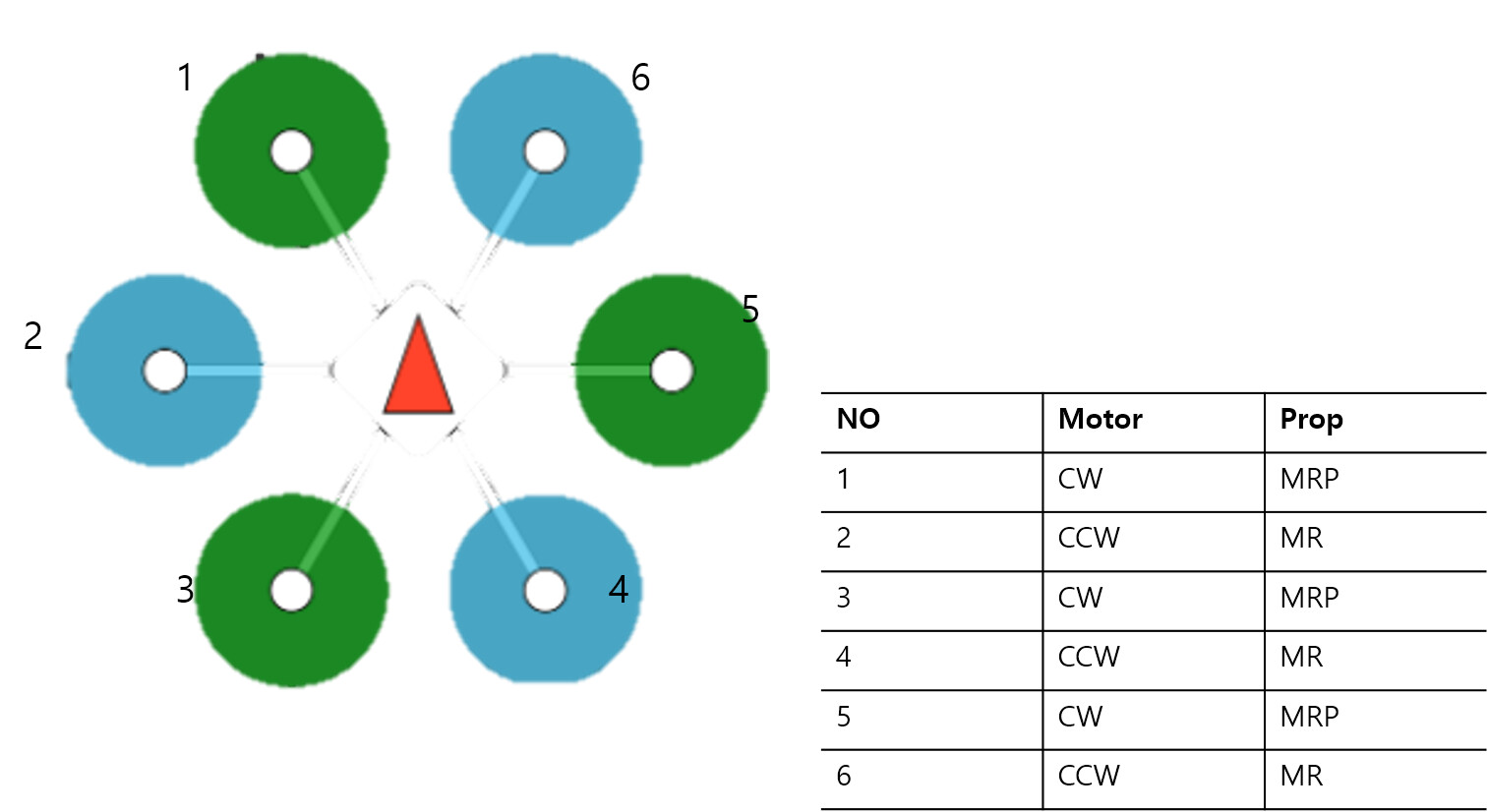
Propellers and motors are named as follows. (Please let me know if you need an additional item name.)
FLASHHOBBY Mars M2812 900KV Brushless motor 3-6S LiPo
[APC] 11x4.5MR Multi-Rotor Propeller
[APC] 11x4.5MRP Multi-Rotor Propeller
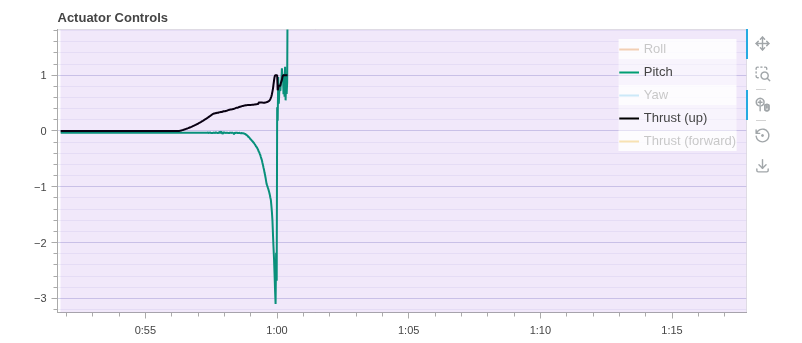
Below are my motor and propeller settings, and I have also attached the flight log from the crash for analysis.
Any guidance or suggestions would be greatly appreciated.