Hi,
I am trying to use PX4 on my drone. My problem is that my UAV keeps flipping over every time I take off, and the flipping always happens in the same direction. Below are some logs.
https://review.px4.io/plot_app?log=10ca19c9-0b5b-41a3-9810-7b74f46e4fa0
https://review.px4.io/plot_app?log=06c5362c-0c69-415e-8a3c-4b3daaf4388c
Thanks in advance.
I had a similar experience two days ago. Instant screaming backflip, smashing the front props (hard) into the floor, and landing on its back!
- PX4 git hash 9be8f81d754d71a1357e739a21cac2c3d9be1acb
- Pixhawk 6C, VTOL in MC mode, manual takeoff.
- https://logs.px4.io/plot_app?log=ae3262af-6e99-4d08-9631-42f6ce6736ed
Have you verified that the motor assignments and motor directions are correct. Check the QGC actuators tab if it’s correct.
@JulianOes Yes, my motor directions are correct, last week my UAV take off successfully and hold stable at height of 2m, now it can’t do that. I want to know if my problem is in PID rollrate?
For me, the motors were out of order. For the same ESC cables, I now have AUX1234 => Motor4321, and it now plugs in on the left (FMU) output bus. Looks like something changed since I first built this thing. QGC PWM AUX goes to the FMU PWM OUT, and PWM MAIN goes to I/O PWM OUT on the 6C.
Have you taken your props off between the previous and current flights? If yes? maybe you have installed it incorrectly.
In other case try to reset your firmware to default and setup it from the beginning again, if a problem is unresolved that means that the problem is not in the firmware.
Check your props and motor for damage.
update: my drone now can take off, but it only hold stable within 5s before flip.
below are some log.
https://review.px4.io/plot_app?log=9889f558-6c5a-4312-bcf3-b497ccfc25e1
https://review.px4.io/plot_app?log=b17a3320-a3cd-420c-b9d9-782e62fa8ced
Can someone point out to me how to change the PID parameters in this case? I really don’t have any experience in tuning PID.
Thank you very much.
My drone can now take off and maintain balance, although there is still a slight shake. The reason is that I changed two PWM_MAIN_OUT and PWM_AUX_OUT parameters from 1234 to 4321. However, these two parameters become 1234 again when I reboot the px4. I confirm that my drone can only maintain stable when these parameters are set to 4321, but I don’t understand the meaning of these parameters. Can someone tell me how it work?
This isn’t using the new actuation config, it’s still on mixer files.
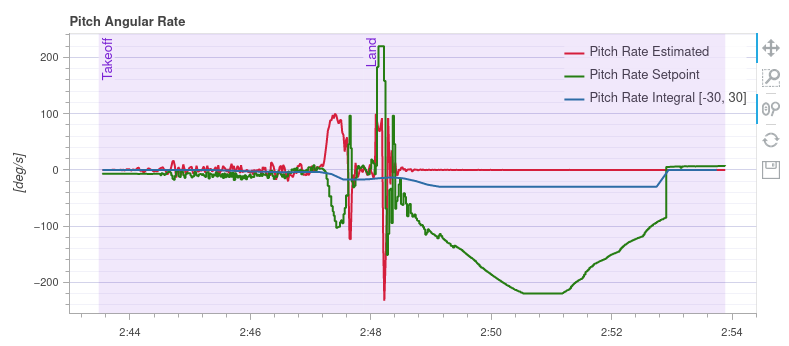
It looks like a motor ordering or direction issue:
@kiencate you can test this by arming in Manual, increase the thrust slightly, but do not take off, then give some roll and pitch commands and verify the correct motors throttle up (the vehicle tries to tilt to the correct side).
Can the motor ordering be changed via param or does that need to be fixed in cabling?
Prev dynamic control allocation it needs to be solved by cabling.