https://dev.px4.io/en/middleware/uorb_graph.html
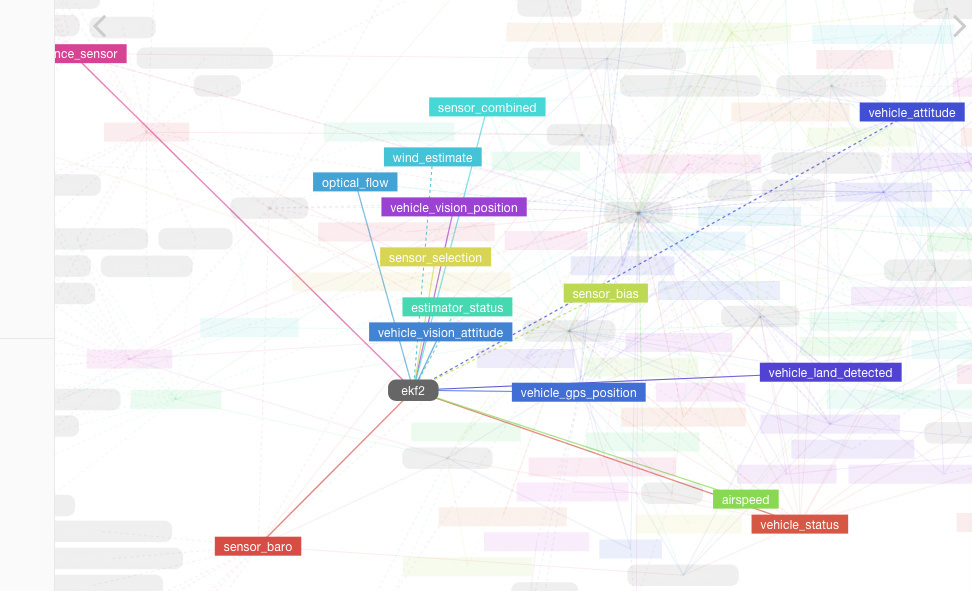
I recently noticed that the uORB graph is inaccurate. Shouldn’t ekf2 be publishing to vehicle_local_position? From the graph it is only publishing to vehicle_attitude.
https://dev.px4.io/en/middleware/uorb_graph.html
I recently noticed that the uORB graph is inaccurate. Shouldn’t ekf2 be publishing to vehicle_local_position? From the graph it is only publishing to vehicle_attitude.
Looking at the script that generates the uORB graph the Publication & Subscription template classes are not yet handle.
Topics being published or subscribed this way won’t be shown on the graph