I have an hexacopter DJI Flame Wheel F550 with an Holybro Pixhawk 4 as fly controller.
- ESC: DJI 30A 0PT0
- MOTOR: DJI 2212/920KV
- PX4 Firmware: v1.11.2
- QGC: V 4
- RC: Futaba T14SG with Futaba R7008SB
I have done all the ESCs calibration with the procedure in the POWER window in QGroundControl(QGC), and was completed without error.
Same for the sensors and joystick.
I have test them in the motor window of QGC and all seems working fine.
But when I try it using the RC the motor start to spin like I was expecting, but when I check the log I see this abnormal behavior.
I set the PWM range in the parameters as min: 1200 and max: 1920
THIS IS THE OUTPUT OF FLIGHT REVIEW
Airframe: Generic Hexarotor x geometry
Hexarotor x (6001)
Hardware: PX4_FMU_V5 (V500)
Software Version: v1.11.2 (97ab8277)
OS Version: NuttX, v8.2.0
Estimator: EKF2
Logging Duration: 0:01:32
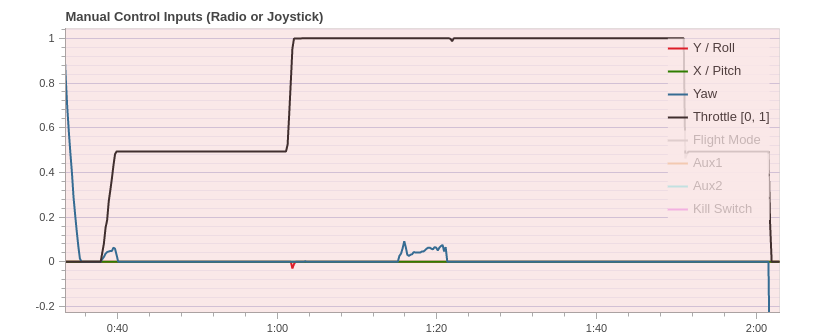
The hexacopter was placed on a table (no GSP signal) for this test, after the arming I left the throttle in the middle position and after some time I try to spin at maximum velocity.
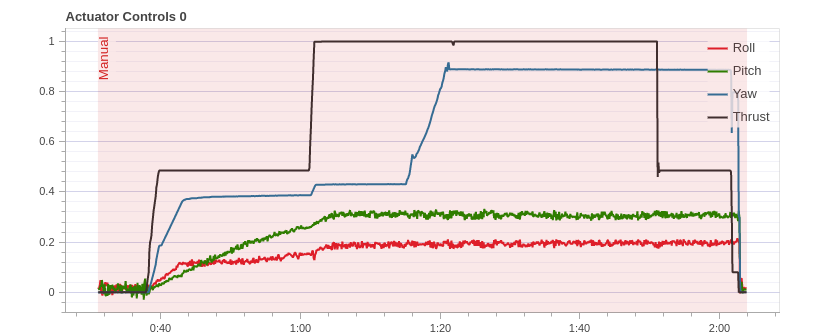
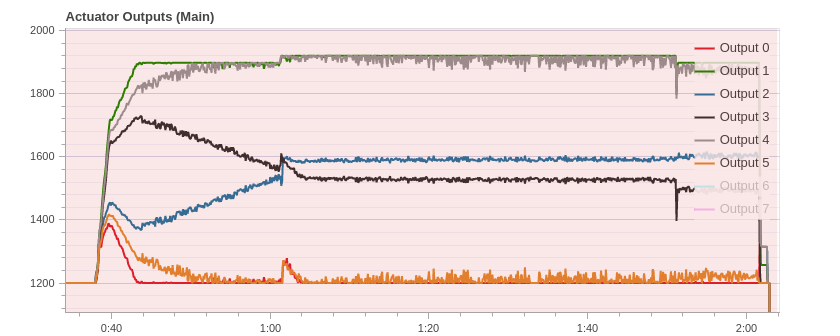
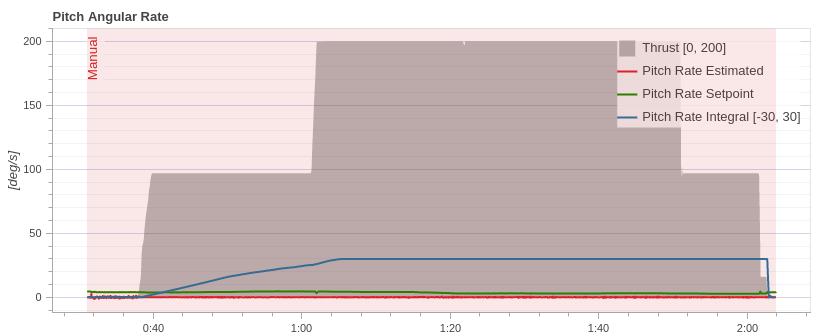
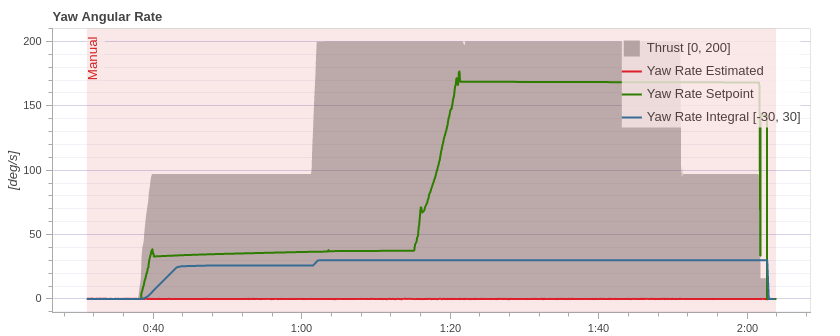
As you can see from actuator output all the six motors don’t perform as I expect, this is my first time using an hexacopter, but I think is not correct that if I give only a specific throttle (with and without propellers) as command all the motor have a different pwm as you can see from the Actuator Outputs plot.
I have test it on another hexacopter(tarot X6) with the sampe fly controller and configuration, and the behavior is the same, plus randomly some motors stops to spin.
Can you please provide me some support with my problem?
Thanks in advance ![]()