I have an hexacopter DJI Flame Wheel F550 with an Holybro Pixhawk 4 as fly controller.
- ESC: DJI 30A 0PT0
- MOTOR: DJI 2212/920KV
- PX4 Firmware: v1.11.2
- QGC: V 4
- RC: Futaba T14SG with Futaba R7008SB
- Airframe: Generic Hexarotor x geometry
- Software Version: v1.11.2 ([97ab8277]
Is normal that if I give a specific throttle with the RC and no other command (except ARM and DISARM) I have this behavior?
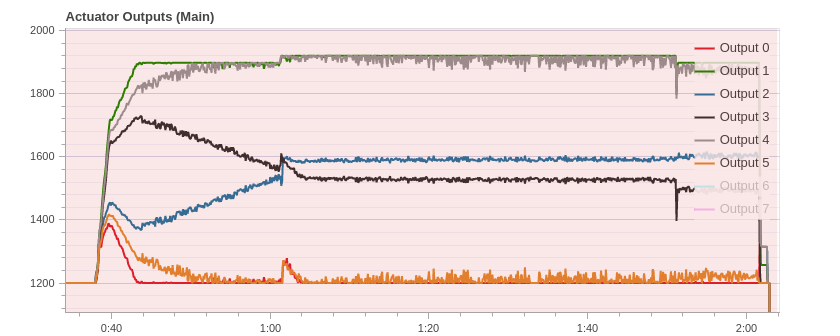
This is my first work with an hexacopter but this output seems really abnormal…
Can someone please explain this or maybe help me to resolve this?
Thank you in advance ![]()