Hello all,
I am trying to do offboard flight using PX4 v1.9.0, ROS (in Higher-level) and Optitrack for motion capture. I do not use MAVROS but have another way of sending associated MAVLink messages. I switch from manual to POSCTL and then to offboard. When switching to offboard, I have configured it in such a way that the drone hovers at the starting point of the desired trajectory. In this case, its a circular trajectory with starting point as (3,0). I am sending both position and velocity setpoints but from the log files, PixHawk seems to command its own velocity.
When the drone begins to actually track the trajectory I noticed the controller lags behind its setpoint.
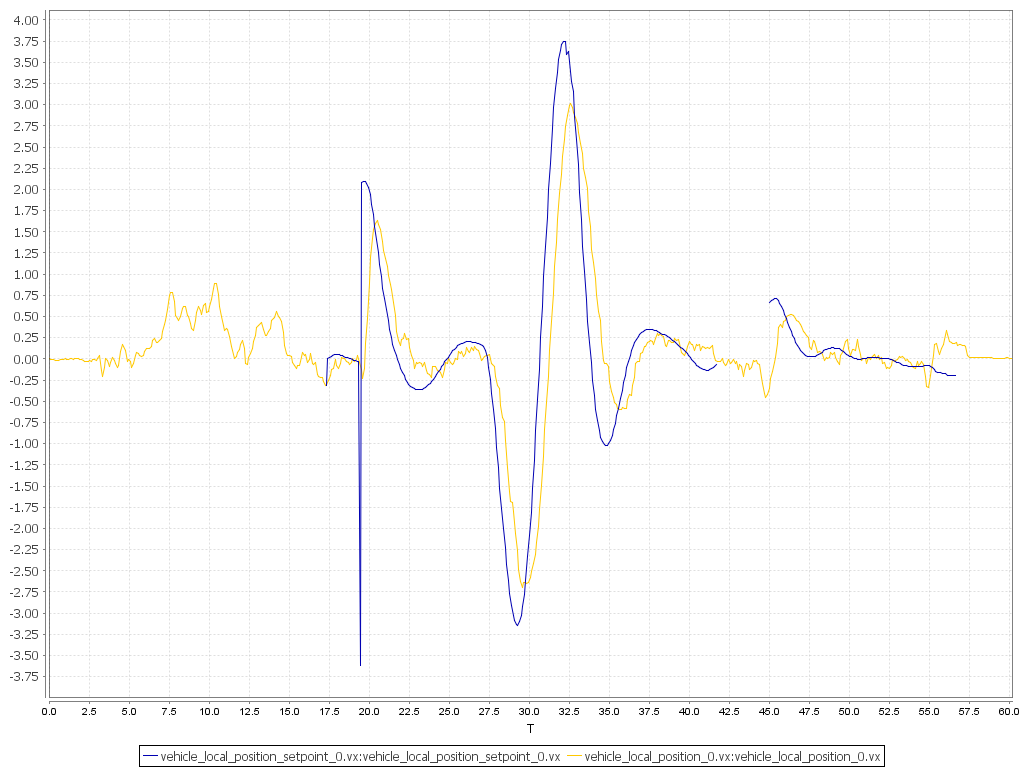
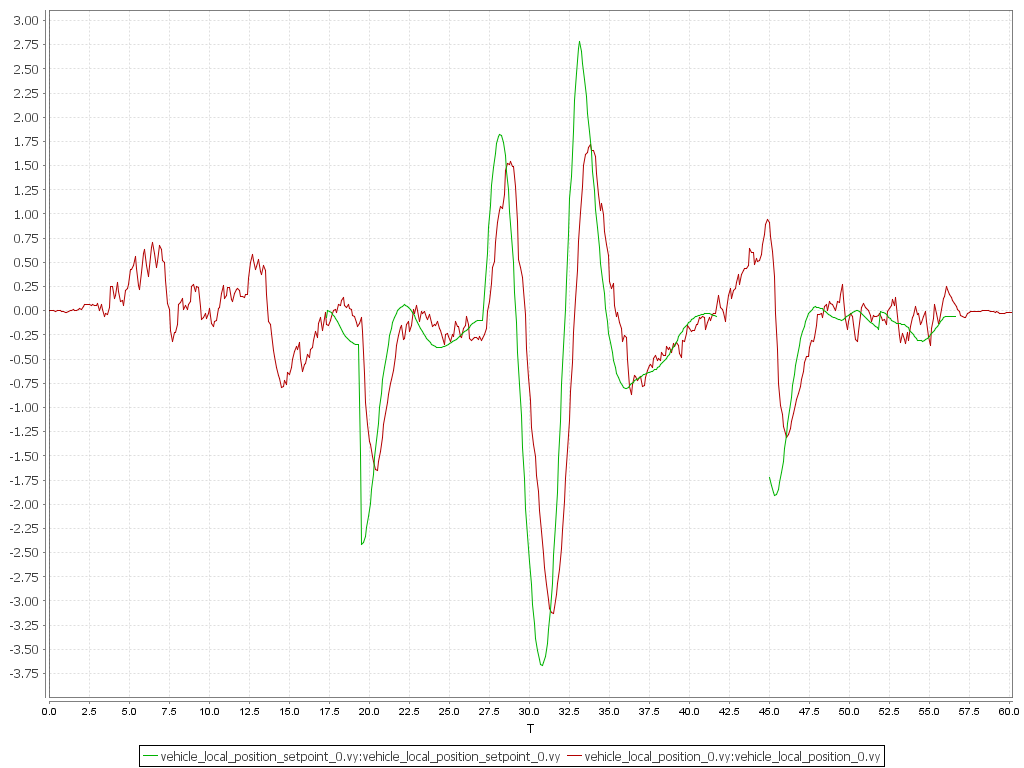


It would be great if you guys could please help with:
a. Quantifying the delay - I think i need to convert timestamp into time and I guess the log frequency is 10 Hz although I am not sure how to calculate the delay in ms.
b. Is this delay existing because of the offboard setup and from the network? I do have a 5G enabled gaming based router. Is there a way to compensate for this constant delay? From my experience testing other trajectories, the delay exists and is constant but its magnitude varies with trajectory I believe although still not sure.
Also, this is my first time posting here so I apologize if I haven’t conveyed information properly the way its supposed to. Feel free to ask for additional plots or clarifications.
Thanks.