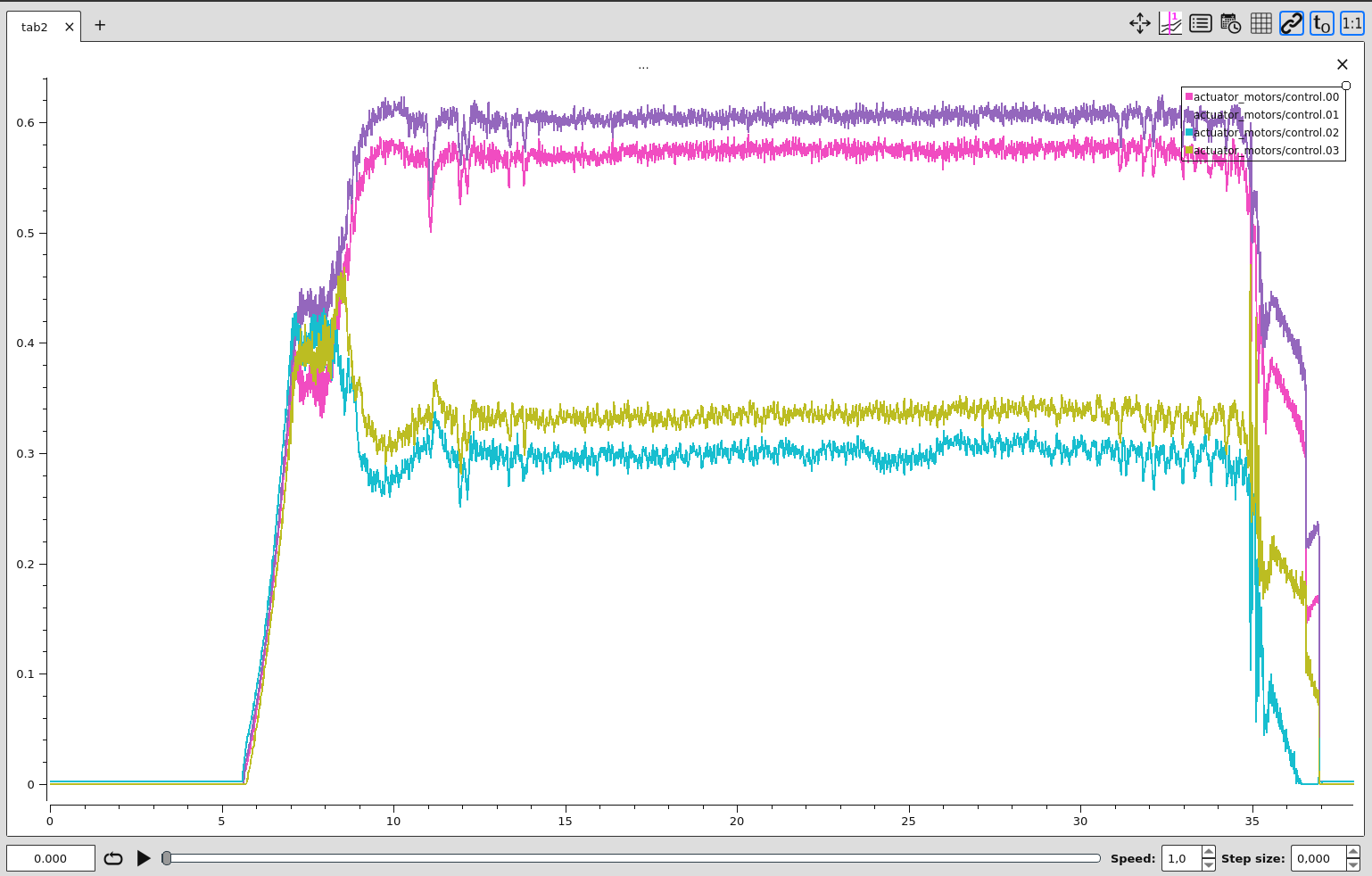
I bought the x500 v2 development platform and built the drone with the standard parts. I then flew the drone in mocap, and it holds position superbly. But I felt it yawed a bit in stabilized. When checking the log i realise that the motor commands for the CCW motors are about double that of the CW ones for the drone to not yaw.
I’m using Dshot 600 for the actuators.
What can be the problem? Is this sofware or hardware? Could it be a esc calibration issue? Also is there a way to check how fast the motors are actually spinning?
log
Motor commands:
And minor side issue, twice when landing one propeller flew off, the “self locking” of the propellers for the platform is clearly not very good, is there an easy fix for this?