Hi there! ![]()
In the past year, I have built a custom hexacopter drone. I use it to fly over large fields, conduct Surveys, and take pictures of agricultural fields.
After the mandatory configurations, I flew and with the standard tuning parameters looks very stable. I wanted to fine-tune so I tried to do “Auto-tune” but after completing it and landing, it does not take off, it struggles to take off (like the motors spin, but it is not able to take off). So I reset all the parameters to Default so I can fly.
I flew many times during the past year, and I did not notice any dangerous flight behavior or crash.
But I saw something that I did not like at all during the past flights, so I tried to search if other people had the same issue here, but I did not find anything relevant.
I use a companion computer to run a script to execute the mission, and connect with my laptop using WiFi.
The issue:
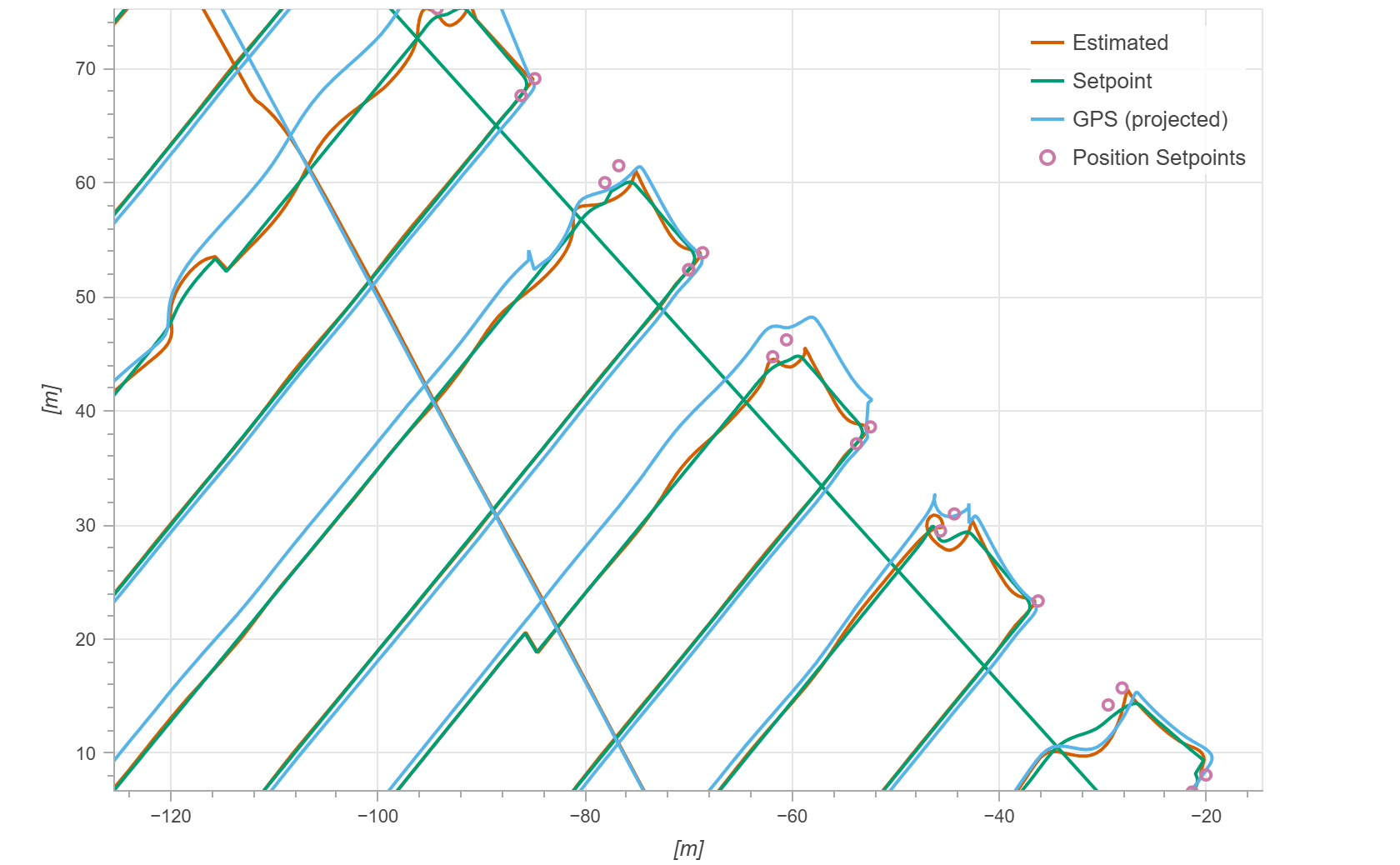
When I fly a mission, the drone does not turn smoothly at all, sometimes it does not do that good, other times very badly (see the screenshot below). It looks like it struggles to follow the turnaround and make weird corrections to remain on track.
In particular, there is no overlap between the SET_POINT and the ESTIMATE plots (see screenshot)
I also notice that during takeoff, it doesn’t take off straight, but it moves a bit along the X-axis. I don’t know if this issue is correlated to that. I put all the components in a way to keep it balanced.
Note that I use the RTK Here+ in combination with Here4, and I just bought a better radio telemetry to not lose connection with the QGC, so if you see “INFO QGC Connection lost,” it is for this reason. Ignore the battery failsafe, too.
I used to fly with calm wind and sometimes with wind: 9.10 mph to 12.30 mph, and gust: 15 mph to 19.8 mph (unfortunately, here it is pretty windy). But I have never seen dangerous flight behaviour.
The accomplishment:
I would like to fine-tune this hexacopter to have a smooth flight mission, but most of all, I want to avoid this bad flight behavior during the turnaround.
If you have any feedback on this build would be much appreciated.
Thank you for your help!
Drone Components:
Frame: ZD850 (850mm) Hexarotor
Motors: T-motor MN5008-KV400 w ESC 60A Flame
Props: 15x5.5 inch Eolo Carbon Fiber Reinforced Nylon
Battery: 6S3P 15Ah 20C (Samsung 50S cells)
FC: CubeOrange+ w Kore Carrier Board
PX4: v1.15.2
GPS: 2 x Here4 + RTK (through QGC Telemetry)
Screenshot and Log:
Log:
https://review.px4.io/plot_app?log=050f4f58-087c-4003-a3c6-b107d26ba135