Hi, I recently made a quadcopter model using Orange Cube+ FCU loaded with PX4-Autopilot version 1.15 and 1.17. In both cases when I tried to fly my drone ( successfully did the sensor calibrations beforehand, but PID autotune was pending ) it wasn’t very stable and made unexpected yaw rotations. Even hold mode was very unstable. In first run (PX4 Version 1.17) it automatically started to speed towards one setpoint at very high speed and crashed. I doubt in this case GPS had high magnetic interference. In second case (PX4 version 1.15) I made sure GPS is far away from all the electrical wires carrying high currents. But in this case too drone was very unstable and did not stabilize even in hold mode. After effort to land, it didn’t disarm but tilted and became upside down.
Can someone please guide me and highlight what I might be doing wrong here. Thanks in advance
Uploaded the logs for reference - PX4 logs - Google Drive
Please upload the logs to logs.px4.io and share the link, once it’s back online…
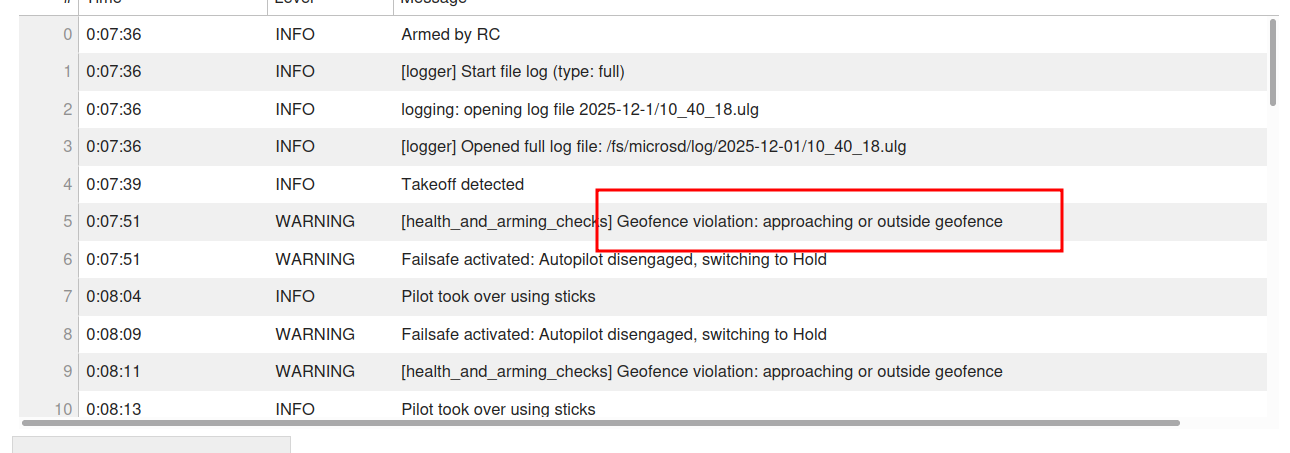
The one thing that jumps out at me is the geofence warning. Is this on purpose?
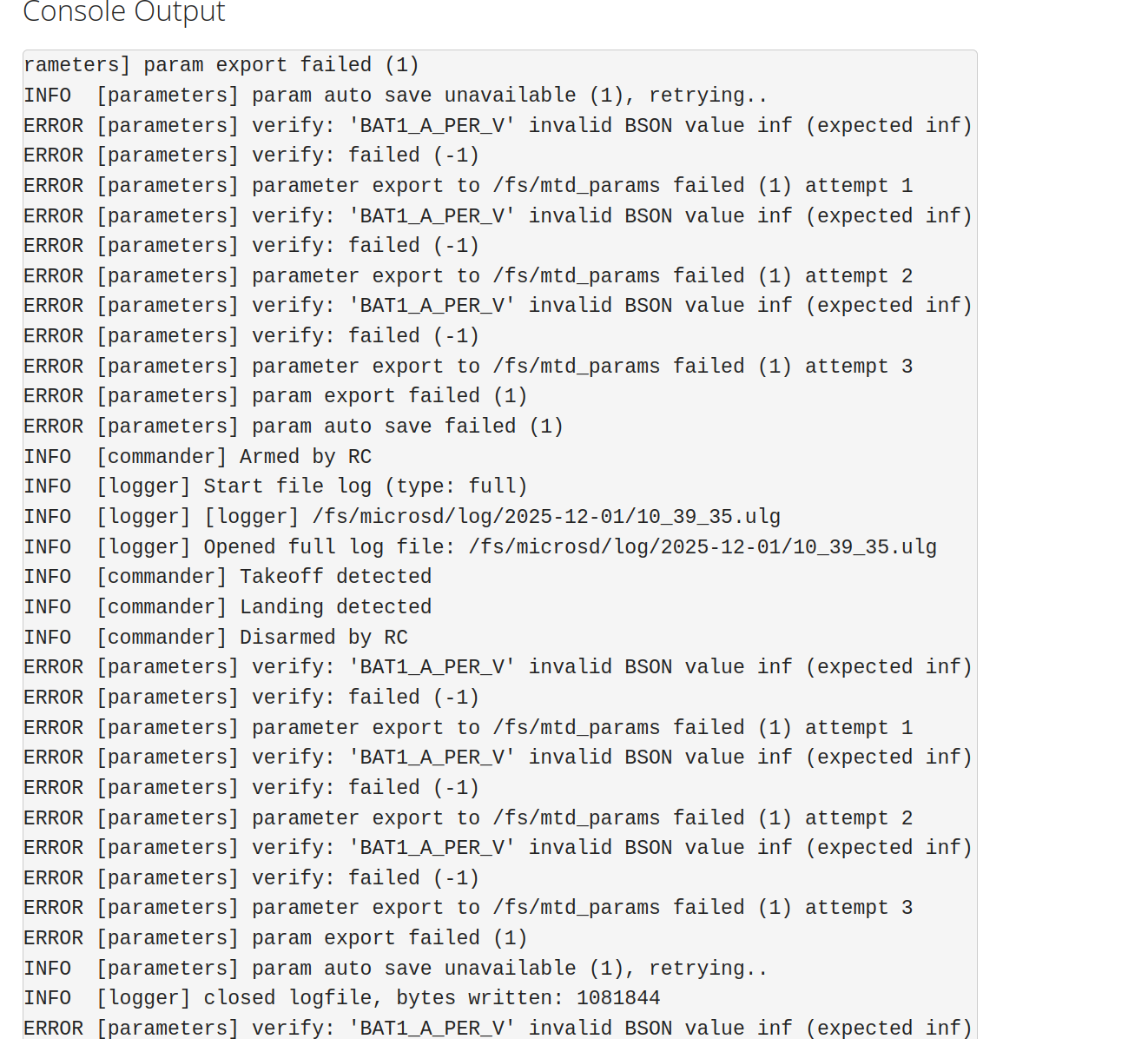
The other thing that I noticed are these warnings regarding param save/export. I’m not sure where these are coming from:
They are usually not there. I would suggest to take a backup of all parameters in QGC, and then reset all params and re-do the configuration and calibration to make sure it is all sane and these errors are gone. Also, make sure the SD card is working correctly.
And then, when it comes to flying, I usually suggest to make some first careful hops in Stabilized mode and only then slowly work up to altitude and position mode, once you know the tuning is good.
Hi,
The Geofence was on purpose, I made it to avoid drone flying away uncontrollably like in the first run. Also, it’s still not very clear to me why the drone accelerated in one direction in the first flight when I didn’t gave any command for that direction.
The param warning are I likely because we didn’t did the battery Amps/Vol calibration. We left the value blank, I think we should have put a dummy value here.
While we were flying the quad, we noticed that Motor 4 propeller was starting later, at a little higher throttle. We tried the auto-calibration of esc but still same. So in this motor’s case I have put of PWM 1300 for minimum RPM (rest are at 1100 ). Now they all start at same throttle, If this is the wrong way to calibrate, will be glad to here about your suggestion.
Thanks for the help!