Hello, I am trying to build my drone by using autopilot CUAV X7+ and Here 3 GPS. Firstly I want to use PX4 as a firmware but I have some issues. I have flashed the PX4 firmware to my CUAV X7+ and tried to fly but there was very agressive oscillations around the roll axis. I couldn’t solve this problem and I have tried the ArduPilot with the exactly same drone and it was a really successful flight.
Again I have flashed PX4 but same problem was there. I have done all the calibrations and ESC calibration. The main problem is that: When I take the propellers out of the motors and make it ARM in altitude or stabilize mode motors are turning great. I make the drone NOSEDOWN and fron 2 motors get faster as the rear 2 motors get slower. And I make it NOSEUP front 2 motors get slower and rear 2 motors get faster as they should.
BUT when I make it turn left around the roll axis left 2 motors get faster and one of the right motors gets slower however the other right motor is full throttle. Same thing is for right roll move. When I turn it right around the roll axis right 2 motors get faster and one of the left motor gets slower but the other left motor is full throttle either. because of that drone does not fly.
My gps is working all the sensors are good but i couldn’t solve this problem.
ArduPilot successful flight video: https://drive.google.com/file/d/1cJVV3C87RUx1AAi8QR635R7H_ZUN-FVQ/view?usp=sharing
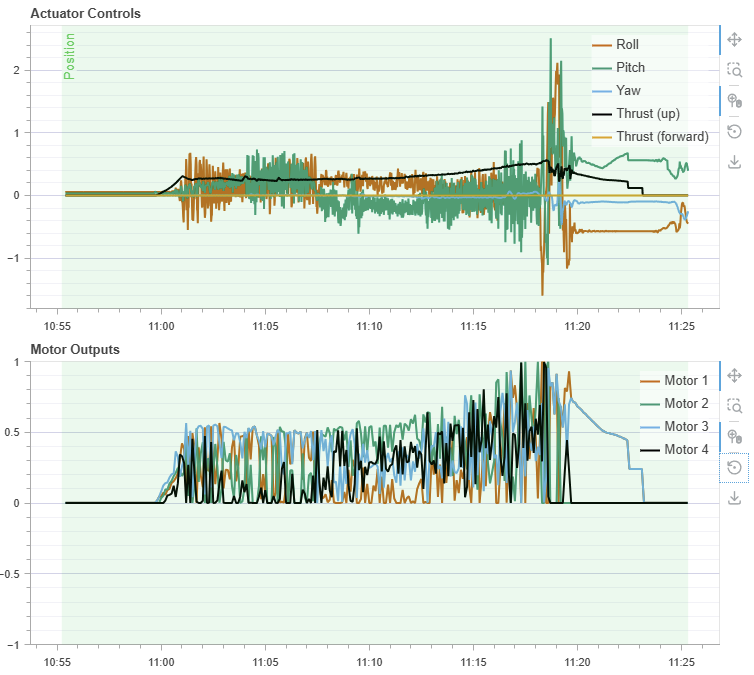
PX4 Crash:
Drone: Quadcopter X
Frame: DJI F450 clone
Edit 1: I have just tried same tests with pixhawk 2.4.8 and get the same result. motors don’t get slower while the roll axis moves.