Hi, All,
I tried px4 some days
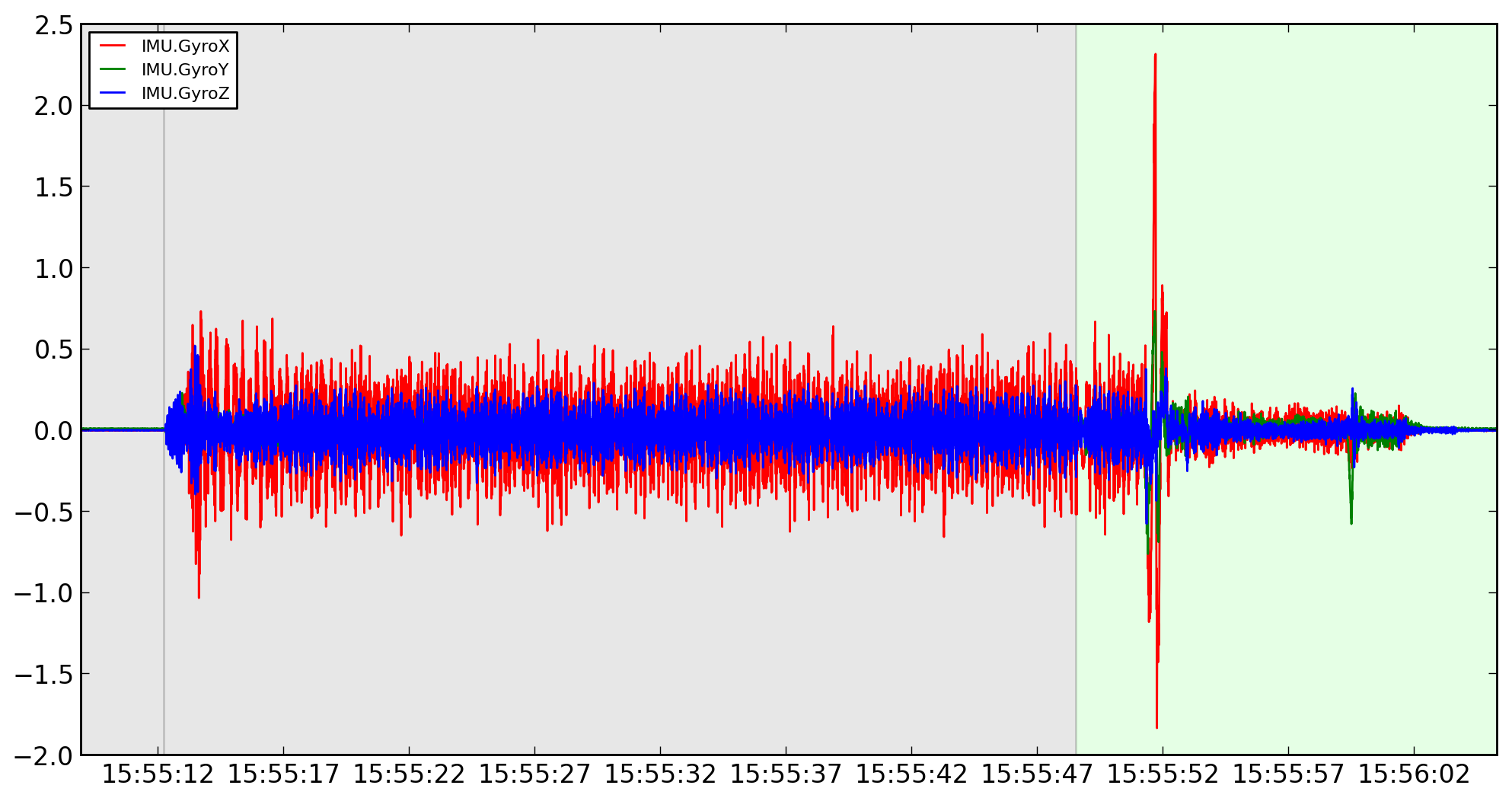
But my quadrotor crashed when I switch to POSCTL mode today.
It is really strange, I could not find where the fault is, and really need some help, any advice will be appreciated.
Sincerely.
crash:
http://logs.uaventure.com/view/2hjvxzkP85zRrFrvf2UgNf
success:
http://logs.uaventure.com/view/rfZQksKdVfmuKFZ3AxWG6P