My setup for this one, was a Armattan CF 320 - Pixracer - Suppo 1100 KV - SimonK 30Amp ESC - X4R RX - M8N GPS.
I raised the throttle very carefully in stabiliyed and my copter was from the beginin on not stable. So I did the sensors calibration again but still not controlable.
Here is the Log
http://logs.uaventure.com/view/mRbbWbRNxveFVBaHbC4JZW
And here are my Parameters (Witch should be the standart one)
https://files.gitter.im/PX4/Firmware/qYYP/160424_Pixracer—PX4-Master—Armattan-CF320—Crash-at-TakeOff.params
Can anyone help on that?
Almoste forget to say, my FC is hardmounted on my frame. This wasn’t a problem some weeks ago.
Was this flying before? If not, are you sure you have the motor order and rotation parameters correct?
If so, what have you changed?
Seconding Mark: What is remarkable here is that the system is not responding to the attitude error correctly. The control system is clearly trying to correct the error but can’t. Wrong motor order is the most likely cause.
This copter never been in the air so this might be the reason indeed! Wich make me look like a fool.
I’ll double check this evenening and get back to you.
Is there a way to check motor order in qgc? How?
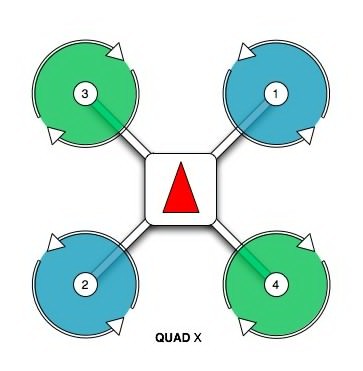
take the props off, then arm the system. Use a strip of paper which you hold against the motor case to tell which way its being flipped / which way it turns. Then make sure they turn as shown in QGC: Green means CW, blue CCW.
I thought we are talking about motro order not spin direction:-)
They do turn the right way since I build it. But I’m not sure if the motor assignment is right.
In mission planner and betaflight you can make spin the motors independently from each other.
Just to be sure, motor 1,2,3,4 are the same as A,B,C,D in mission planner, right?
Motor 1 and 3 where switched, so thats why it fliped. Now it works fine 