Hi,
I’m having a little trouble now in PX4. Once I switch mode to POSCTL, the quadrotor begin to shake, if do not back to STABILITY mode, it will cash anyway. (btw, takeoff in POSCTL could cause rollover)
The quadrotor is really stable in MANUAL mode, so I think the Gyro sensor is fine, I also have tried change another GPS, but it’s useless. (My friend flied a arducopter quadrotor by the side, his POSITION mode was stable, so I think maybe I configure something wrong…)
I could not work it out, and really need some help.
Sincerely, any advice is appreciated.
Firmware: 1.5.5 Stable
Air Frame: Generic quadrotor X config
There are logs of my flight, immediately shake when I change mode, so I have to switch back to altctl.
And gps_data was logged by QGC after the two flights.
log_1: http://logs.uaventure.com/view/LQRD4er9jS4gpkr49tZkAb
log_2: http://logs.uaventure.com/view/DEnHTgdYEckznRkehX5pAM
gps_data: http://paste.ubuntu.com/24235235/
Hi,
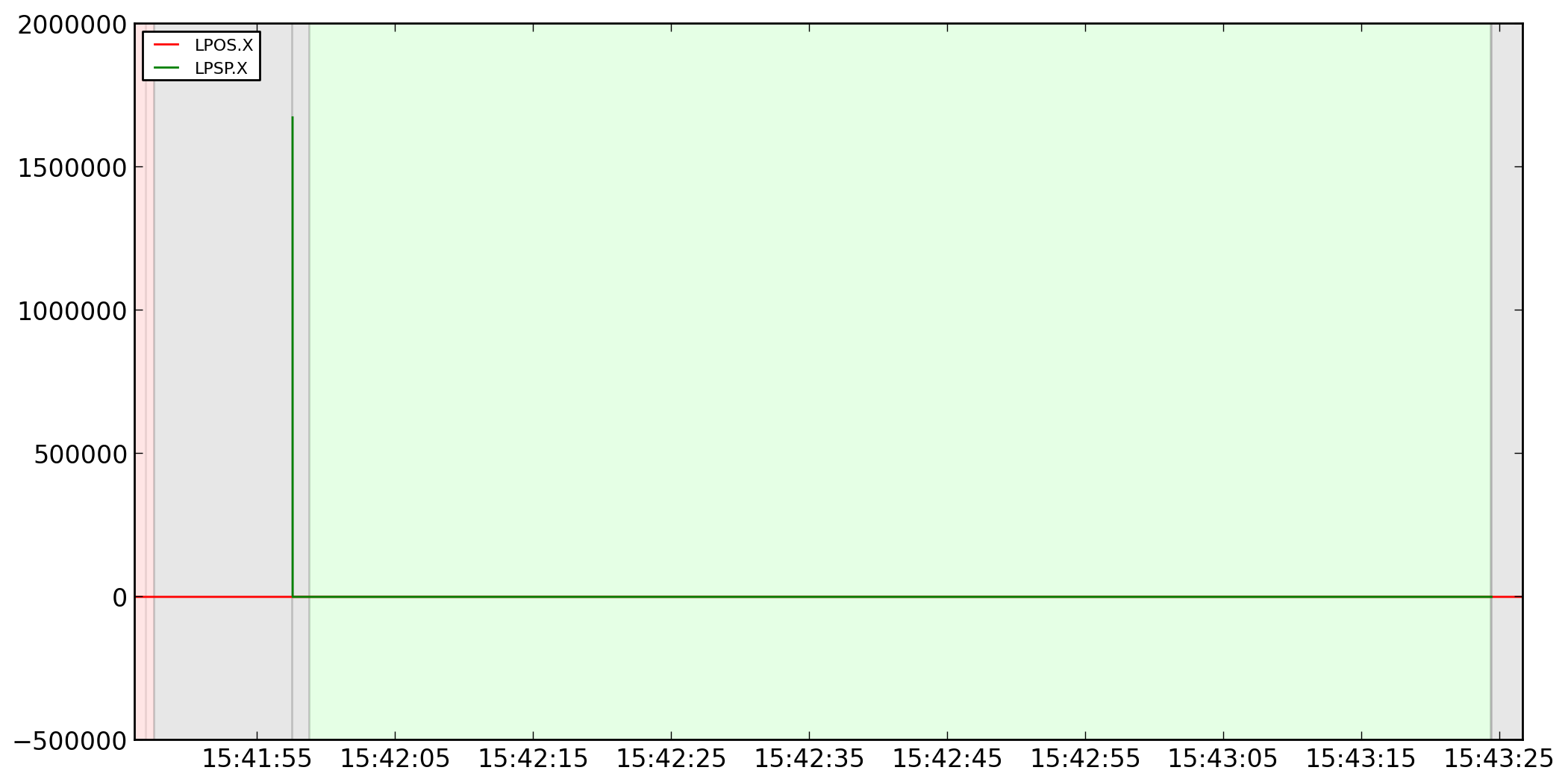
Sorry to hear that you are having problems. I looked through the logs and as soon as you switch to altitude control mode your position set points go to 17*10^5.
@LorenzMeier Have you seen this before?
1 Like
@CarlOlsson Thank you for your reply, if you need other logs, I could do more test.
@CarlOlsson After a complete erase and re-download, this unstable problem was solved, but the set points (Local Position X) abnormity still arise sometime.
Here are two flight logs (both successful flight)
http://logs.uaventure.com/view/pwqPfcEdoRwNCzURZJN7Lk
http://logs.uaventure.com/view/5L674d2qFdXXP4ZTMDBWGN
I hope these could help improving PX4 stack.
I am facing similar issue. I tried 1.5.1 to 1.5.5. All produce same issue. Issue is that the copter shoots up in the sky once I switch to poctl or Altctl modes. I am using Lidar lightware . It did that using both LPE and EKF2.
@Mzahana Hi, try to decrease MPC_XY_VEL_P, this could reduce oscillation, but the unstable still happened sometime, and to my surprise, the oscillation only effect on roll, that means, when I switch to POSCTL, pitch is stable but oscillation on roll is very scary.