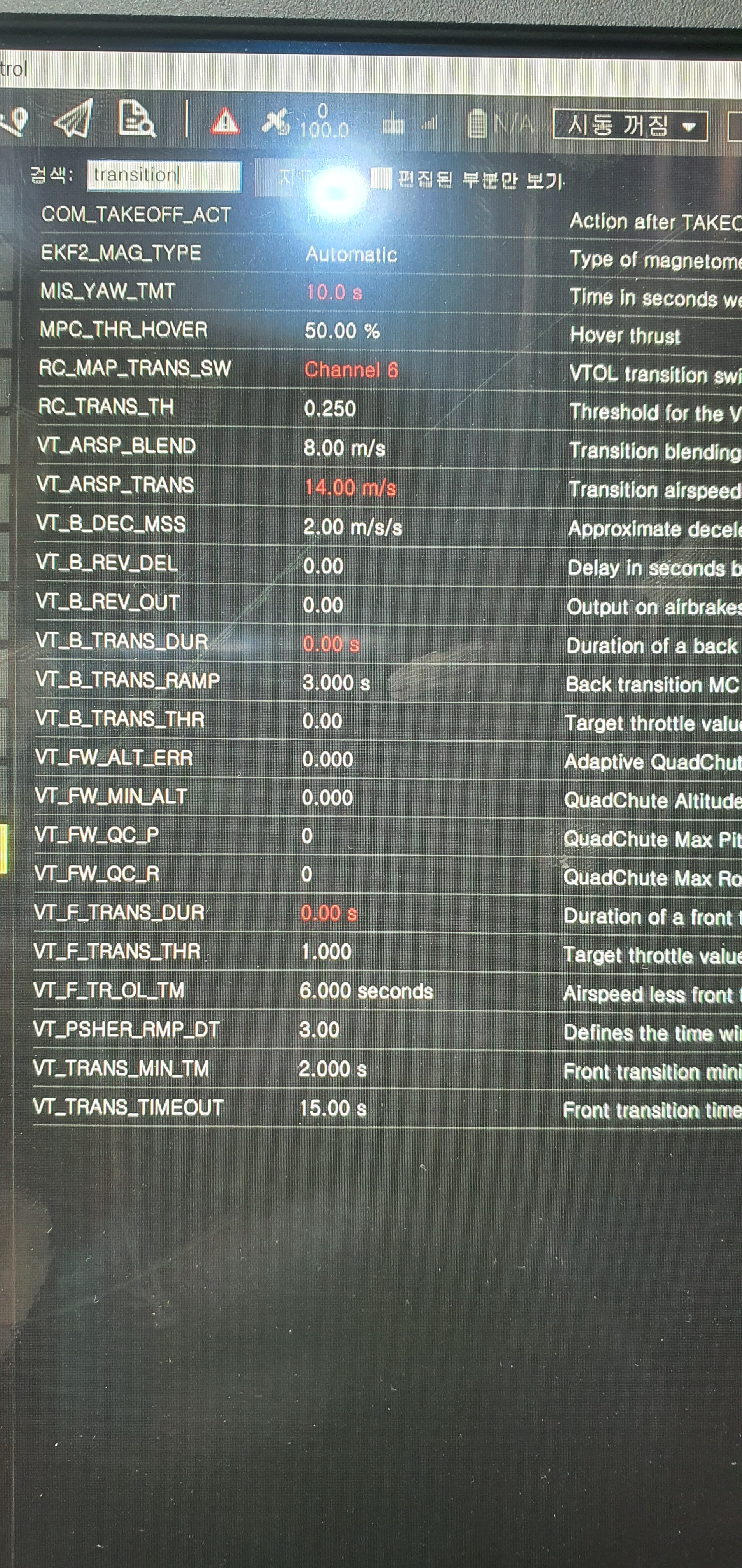
I set these values to 0.
However, it seems that the vtol flying at high speed and i think set zero is not correct.
How many seconds do you guys set ?.
If this is 0, is there no problem?
I set these values to 0.
However, it seems that the vtol flying at high speed and i think set zero is not correct.
How many seconds do you guys set ?.
If this is 0, is there no problem?
For the most part, the default settings for a given airframe works fine. On mine, I’ve adjusted it from 4-6 seconds, depending on how jerky it gets to stop from FW to MC.
Unless you’re not using an airspeed sensor, 4 seconds for front transition should unless it’s severely pitching down right before FW mode.
Good luck.
VT_F_TRANS_DUR is only relevant for tailsitter and tiltrotor. If you have a standard VTOL, VT_ARSP_TRANS (if you have an airspeed sensor), resp. VT_F_TR_OL_TM (without airspeed sensor) are the relevant parameters.