Hi, I am making a coaxial helicopter and I am testing the drone.
I crashed during the flight test this time and there are some issues.
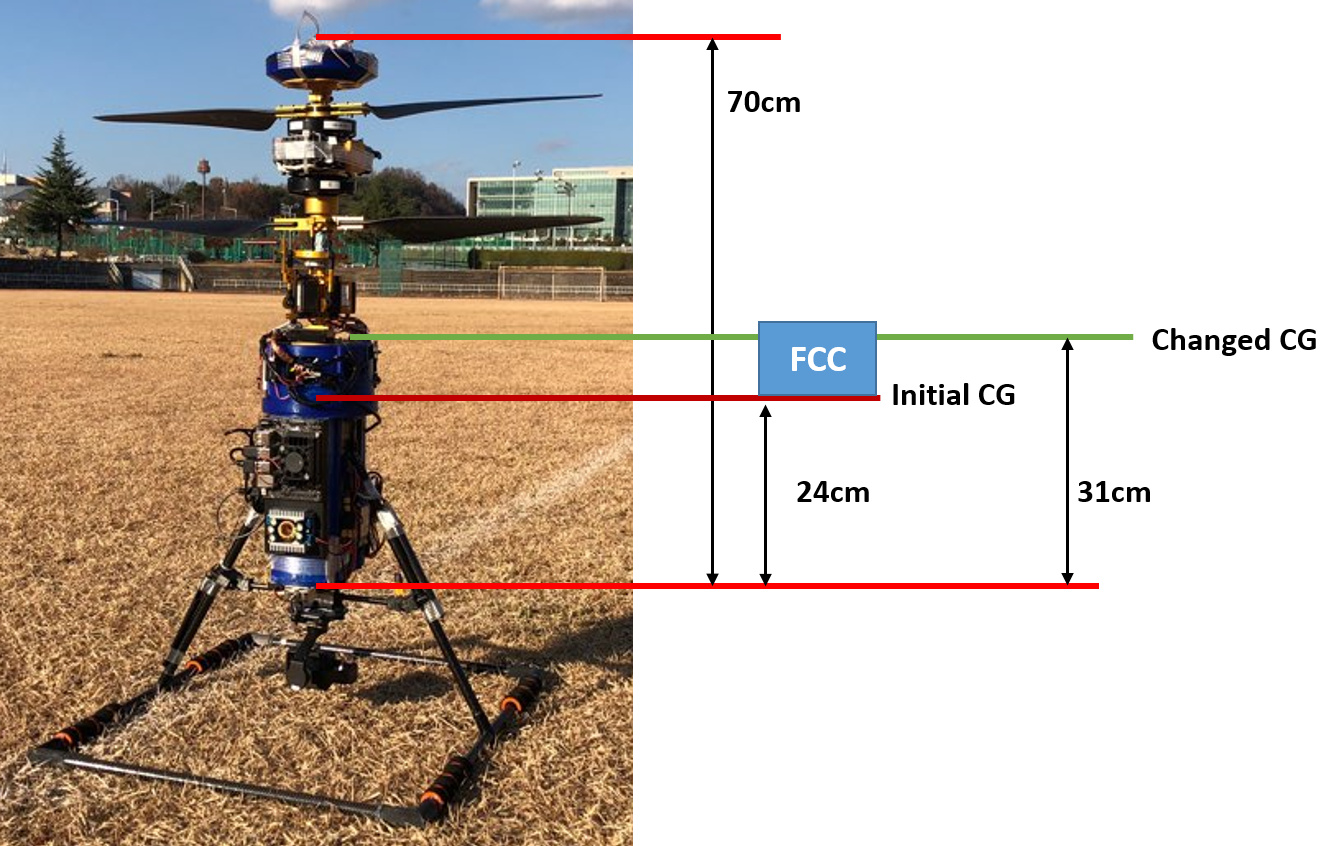
The first issue is the center of gravity of the helicopter.
I took two flight tests as shown in the log below. In the second flight test, I removed the battery (1.2kg) for a lack of thrust.
In the second flight test, the aircraft took off and crashed.
Looking at the log file was not a vibrating divergence. It was a divergence with a slow frequency.
I simply can’t figure out if it’s a fall due to center of gravity or if gain tuning is less.
1st Flight Test
https://review.px4.io/plot_app?log=4dffd7de-dca4-42a4-9cc0-a4bb03726888
2st Flight Test
https://review.px4.io/plot_app?log=0c063c5f-2cf2-464d-a8fb-f81674c0b6dd