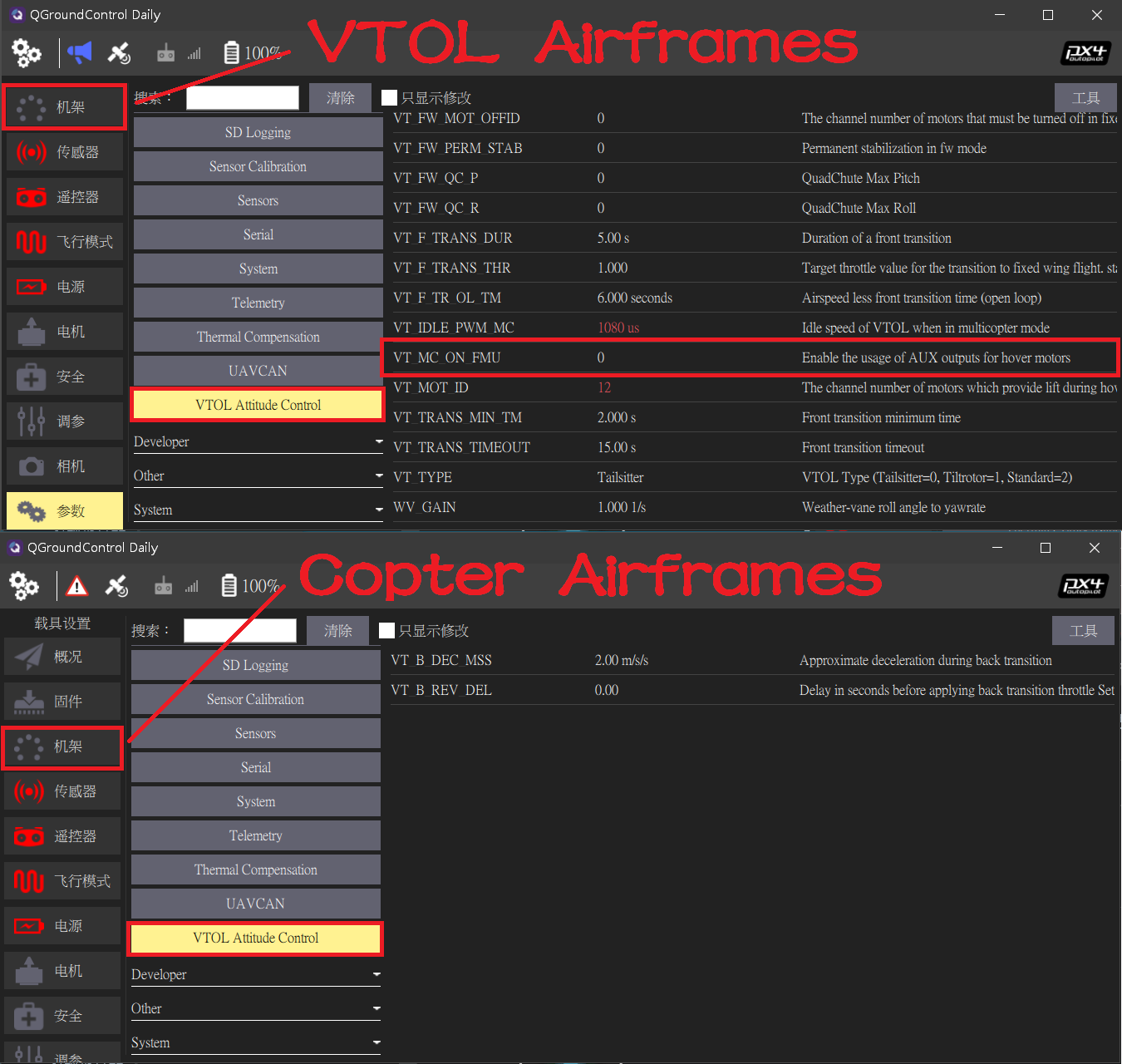
I’m still very new to PX4 and Qgroundcontrol so apologies if this is very trivial. I’m currently building a 12 motor Dodecarotor cox Drone (Hex orientation) and currently I’m having an issue trying to enable one of the VTOL atittude params. Specifically, I’m trying to enable the VT_MC_ON_FMU param (found here https://docs.px4.io/v1.11/en/advanced_config/parameter_reference.html) which enables the use of the AUX outputs for hover motors (currently all my motors plugged into the AUX ports aren’t spinning). However, in Qgroundcontrol, When I filter for VTOL Attitude Control Params (i.e. VT params) only two VT params appear as shown below:
I’m not sure if this is your answer but try loading the Dev version firmware. By the way, I took the liberty of changing the category to VTOL. Hopefully, more can chime in.
Thanks for the advice (and changing the category ). I also have a pixhawk pro 2.4.8 and tried to see if I could see VTOL attitude params on another piece of hardware and couldn’t (by also flashing the hardware with the Dev firmware). I even followed this guide to do the FMU v2 bootloader update on FMU v2 boards (Loading Firmware | PX4 User Guide) and still couldnt see the remaining params (the FW version was 1.12.0beta). Any other ideas? Thanks in advance.
Also general question: does doing the vehicle setup (i.e. sensor calibration, radio setup etc.) reveal more params as you go, or should all available params be visible immediately after flashing FW.

 ). I also have a pixhawk pro 2.4.8 and tried to see if I could see VTOL attitude params on another piece of hardware and couldn’t (by also flashing the hardware with the Dev firmware). I even followed this guide to do the FMU v2 bootloader update on FMU v2 boards (
). I also have a pixhawk pro 2.4.8 and tried to see if I could see VTOL attitude params on another piece of hardware and couldn’t (by also flashing the hardware with the Dev firmware). I even followed this guide to do the FMU v2 bootloader update on FMU v2 boards (