Hi everyone!
So I am building a VTOL aircraft with Cube Orange running of v1.13.0 Standard VTOL (Generic QuadPlane VTOL) firmware.
For my particular build, I want two outputs for rudder (I have two rudders). Now, I know I can connect the two signal wires of both the rudder servos together and connect that into one single Pixhawk pin (AUX 4, according to this), but due to some constraints I am unable to do that.
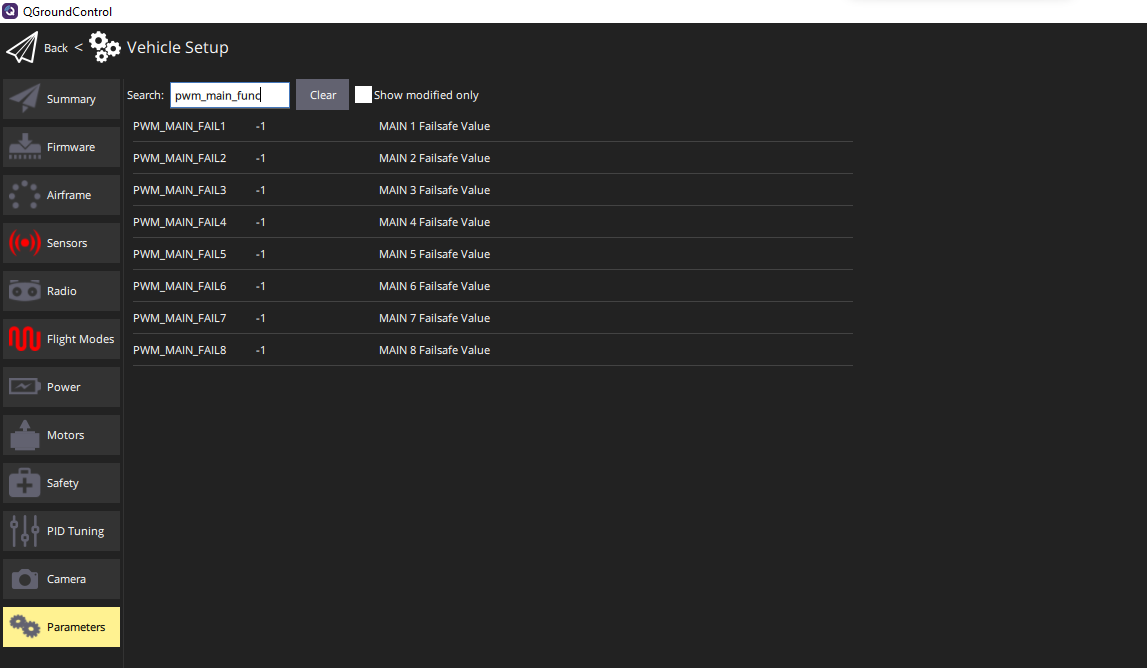
So, I found a parameter called PWM_MAIN_FUNC5, wherein I can use pin Main5 of Pixhawk for the rudder if I switch this parameter to 405 (or 410? because standard VTOL firmware has rudder at AUX4). However, I am not able to find this parameter in QGC. I tried the master firmware as well, but couldn’t find it there as well.
- Does anyone know why am I not able to see the PWM_MAIN_FUNCx parameters?
- How else can I use Pin MAIN5 to deliver same signal as AUX4?
Thank you!
Hi again.
I am beginning to think that these PWM_MAIN_FUNCx parameters have been removed in the recent firmware versions, or maybe these are not available for Standard VTOL airframe.
Does anyone know any method to assign the output of one of the Main pins (on Cube standard carrier board) to be the rudder pin (which, I believe is AUX4) output? This way I can plug in the second rudder (check original post for details) in one of the unused main (5, 6, 7, 8) pins.
I guess you need to enable dynamic control allocation to be able to use main and aux pins in PX4. To do that set SYS_CTRL_ALLOC=1 in parameter tab then reboot the vehicle. And also you will see actuator tab on the left after that. Let me know if it works.
Hi Elvin.
Sorry for not replying earlier. I had to switch to ArduPilot because of the client request, so I didn’t get a chance to go back and test this.
Anyway, yes, the CA (control allocation) parameters have been enabled by default in the v1.14 release (yay), so that’s a really great feature. That should solve the problem I was having earlier.