I am following the steps for initial set up for PX4 using ROS, Gazebo, and MAVROS. I am following the youtube video: 🚀 PX4 MAVROS Python Tutorial (Part 2) - YouTube
I get the PX4 console to partially display but then see the following:
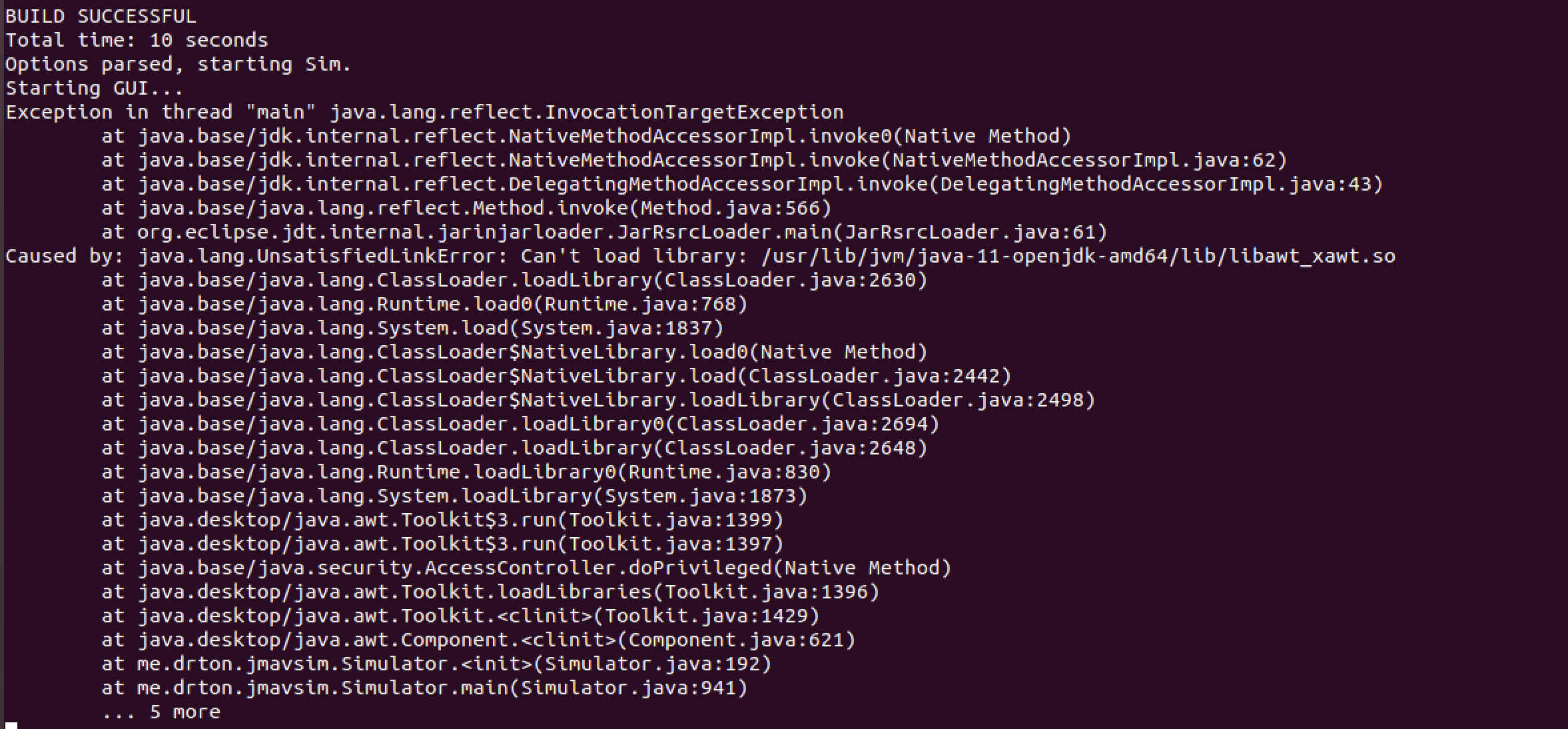
I believe the issue is that for ROS, Gazebo, and MAVROS, we need to use Ubuntu 18.04. It seems that a lot of the PX4 features don’t work on this version Ubuntu, including jmavsim and QGroundControl.
If I want to keep learning how to use PX4 with ROS, Gazebo, and MAVROS, what are my next steps?
Thanks in advance!