I understand that PX4 is recommending ROS melodic with Ubuntu 18, so I reinstalled these versions and tried to build PX4 following the instructions in: Building the Code · PX4 Developer Guide
I can run the jMAVSim using the following command:
make px4_sitl jmavsim
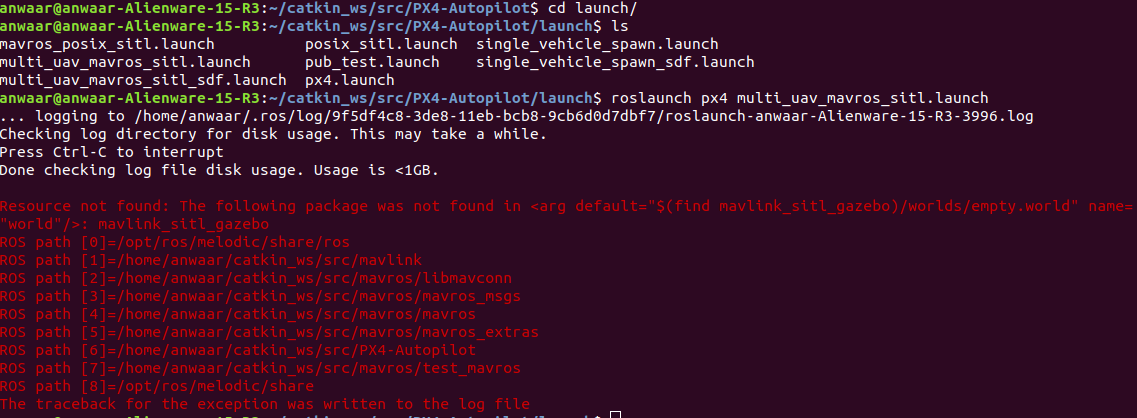
But when I try to build catkin, in order to use GAZEBO with PX4 launch files, I get the following error:
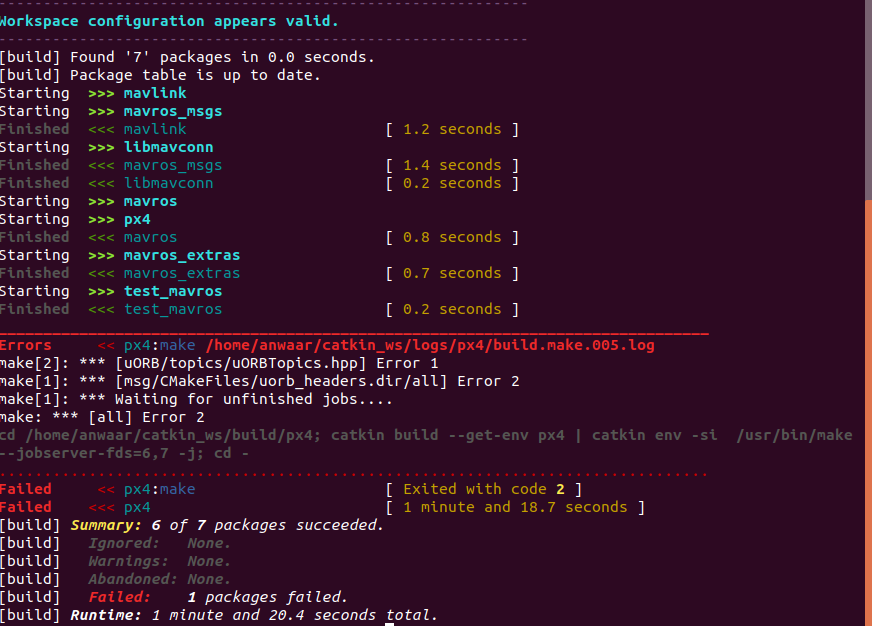
What is wrong? How can I run PX4 launch files to use IRIS vehicles in GAZEBO and mavros?
Thank you