I am trying to get PX4 working on an mRo Control Zero and am not able to get the battery monitoring to work in QGroundControl. In the MavLink console, I see the correct brick voltage but brick_valid = 0. I am running v1.11.2. Any help would be greatly appreciated!
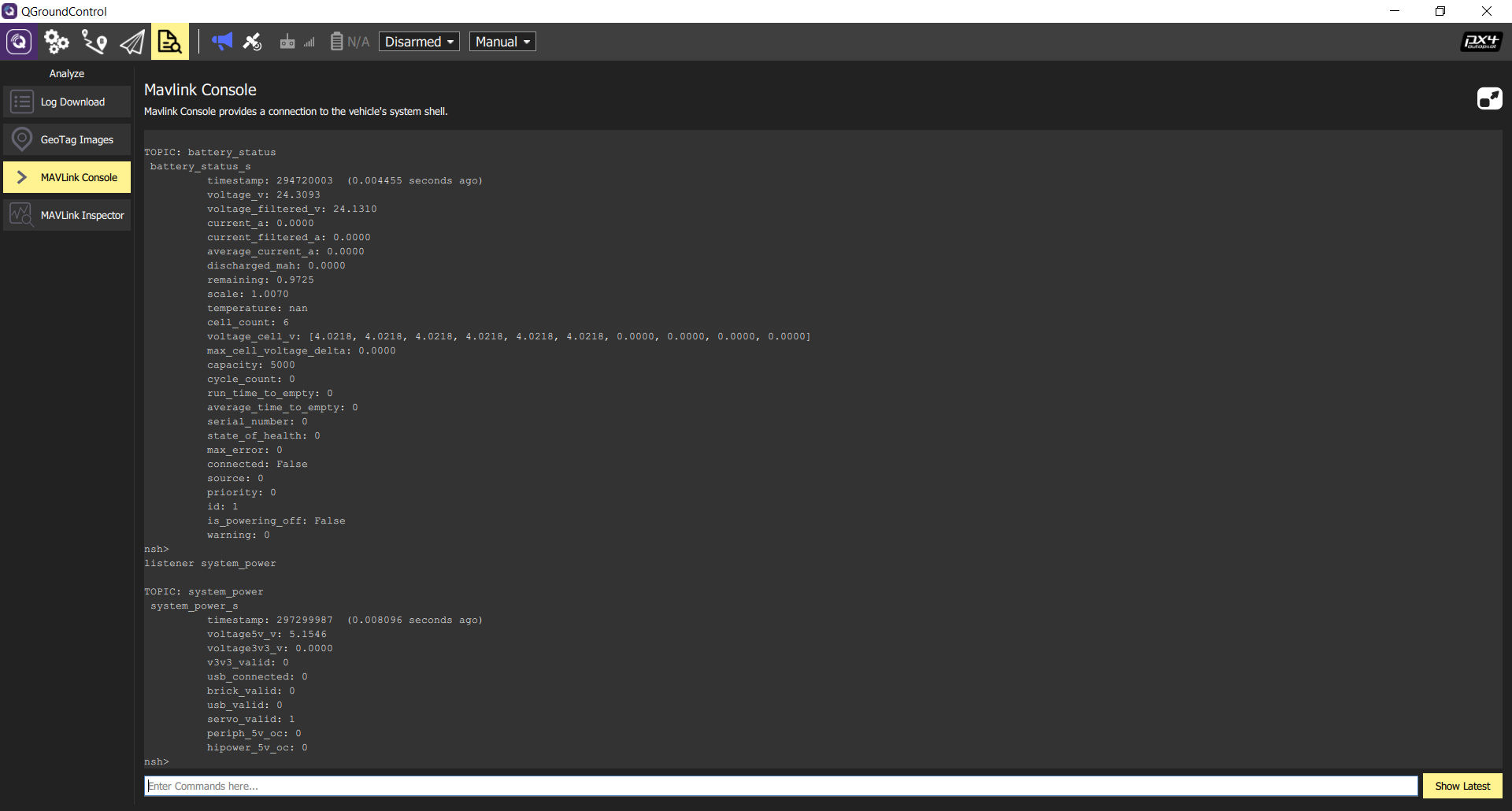
Hmm, it looks like brick_valid = 0 is actually the true state, and changes to 1 if the brick is disconnected. I am wondering if the issue has something to do with this line in analog_battery.cpp:
bool connected = voltage_v > BOARD_ADC_OPEN_CIRCUIT_V &&
(BOARD_ADC_OPEN_CIRCUIT_V <= BOARD_VALID_UV || is_valid());
BOARD_ADC_OPEN_CIRCUIT_V is set to 5.6 in board_config.h for the Control Zero and BOARD_VALID_UV is set to 3.7 in board_common.h
I compiled v1.11.3 after changing BOARD_ADC_OPEN_CIRCUIT to 1.0f in the Control Zero board_config.h and now I see the correct battery voltage at the top of QGroundControl and see “Connected: True” under battery_status in the MavLink Console. I’m not going to mark this as resolved, since I am not familiar enough with the code to convince myself that this is the right solution.
Hello there, I’d like to get some advice on the more Control Zero OEM H7 with Arducopter 4.0.5 and Power Module configuration. I’m experimenting with the Control Zero for the first time (I was mostly familiar with the Pixhawk CUBE), and I’ve set up my Quad Copter according to all specifications and documentation I could find. (See attached more pinot diagram)
So far, everything is in working order, and I’ve flown without incident; the GPS system is also in working order, and so on.
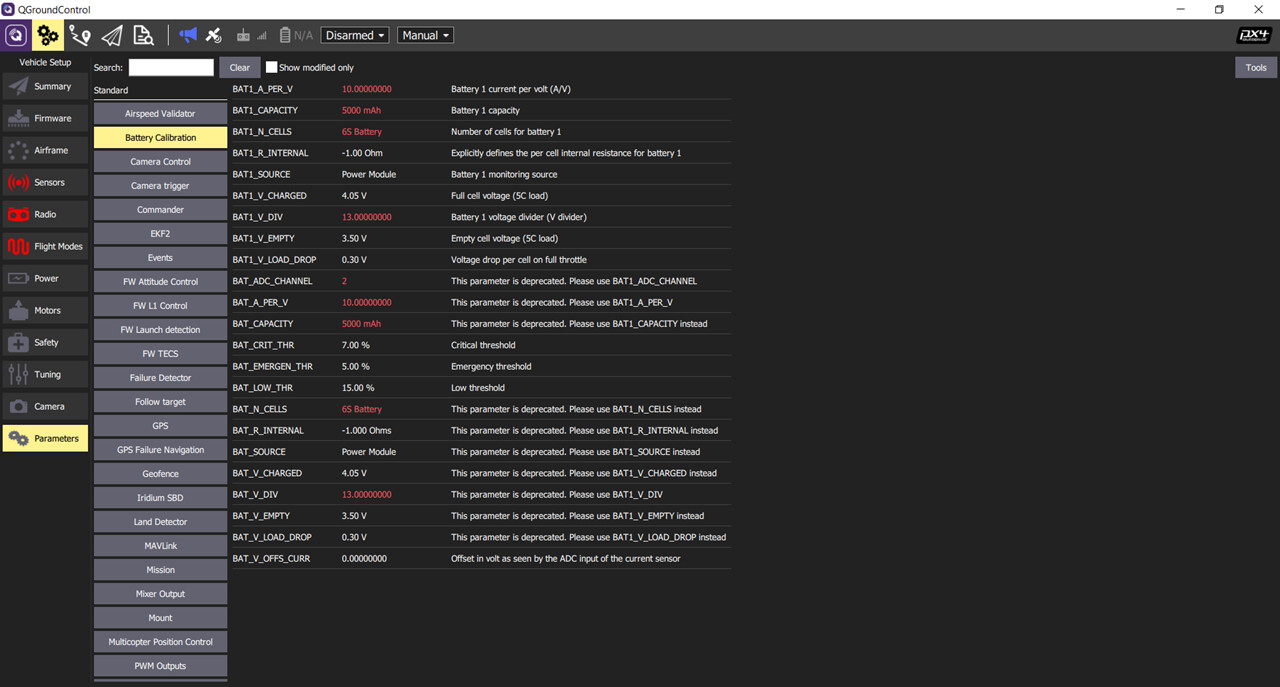
The only issue was with the Power Module setup, which gave me no reading under Monitoring despite the fact that I had selected the most relevant settings (As attached)
Good day there, I’d like to get some advice on the more Control Zero OEM H7 configuration with Arducopter 4.0.5 and Power Module. I’m experimenting with the Control Zero for the first time (I was previously only familiar with the Pixhawk CUBE), and I’ve configured my Quad Copter in accordance with all specifications and documentation I could find. (An additional pinot diagram is attached.)
For assistance with ArduPilot, best to visit discuss.ardupilot.org
[quote=“nbort, post:3, topic:20392”]
I updated the Control Zero board config.h file, and now I see the correct battery voltage at the top of QGroundControl, as well as “Connected: True” under battery status in the MavLink Console. I’m not going to mark this as resolved because I’m not familiar enough with the code to be convinced that this is the correct solution.
Hello there, I’d like some advice on the more Control Zero OEM H7 configuration with Arducopter 4.0.5 and Power Module. For the first time, I’m experimenting with the Control Zero (I was previously only familiar with the Pixhawk CUBE), and I’ve configured my Quad Copter in accordance with all specifications and documentation I could find. (Another pinot diagram is included.) visit here