This message means that the 5V supply to the Pixhawk is dropping below a certain threshold. This can be dangerous as it can lead to inconsistent behavior of the flight controller itself or components powered by it (e.g. GPS). Rather than switching to an older version that perhaps checks this less strictly, I would recommend checking the voltage (e.g. at the power input port of the flight controller, the GPS port, I2C ports, etc) with a multimeter to ensure its stably around 5V. If you think it is and the reporting is therefore false, I’d open an issue on Github.
I get 4.9V on the pixhawk and sensors, and about 1A output. Very strange that 0.1±% has an effect on the system. Any suggestions fixing the problem? After downgrade, I still get the Avionics power low, but the software bypasses it. Strange
First, The Pixhawk depends upon voltage/current translation from the power module, using a scaling which can vary (normally) over temperature and the specifics of your hardware.
Before you give up, measure your battery voltage by hand (preferably at the terminals leading into the power module, while the battery is connected), and then make sure the “voltage divider” setting in Power Setup (QSG) is correct: press [Calculate], plug in the value you measured, and then press [Calculate] again.
Second, I’ve noticed PX4 getting increasingly fussy about having a solid 5.3VDC+ supply at the power port of the FMU itself. This is IMPORTANT, because if you feed it just the typical 5VDC from a BEC that isn’t APM/PX4-aware, then the onboard regulators are in dropout. This is a bad situation to fly in.
When Pixhawk’s regulators are in dropout, ALL your downstream devices (anything powered from a Pixhawk port) get an unstable supply level—making them unpredictably (but predictably) VERY unhappy.
Unfortunately, all Pixhawk-clone hardware really NEEDS a 5.3VDC+ source supply, as far as I can tell. And since so many PDB/BEC combinations use switching buck regulators, they aren’t easily adjusted upwards from their 5VDC factory setting.
I’ve given up using anything but true, APM/PX4-aware power modules for just this reason. It sucks, because there aren’t many PDB/BEC-style ones available. And the newer, Hall-Effect ones are physically, inconveniently large.
If you’re using a 5V BEC as your upstream power supply, then 0.1% variability is because the regulators onboard the Pixhawk aren’t actually regulating: they’re in dropout.
Boosting your upstream supply above 5.3VDC is the only stable solution, unless your setup lets you power your downstream devices independently.
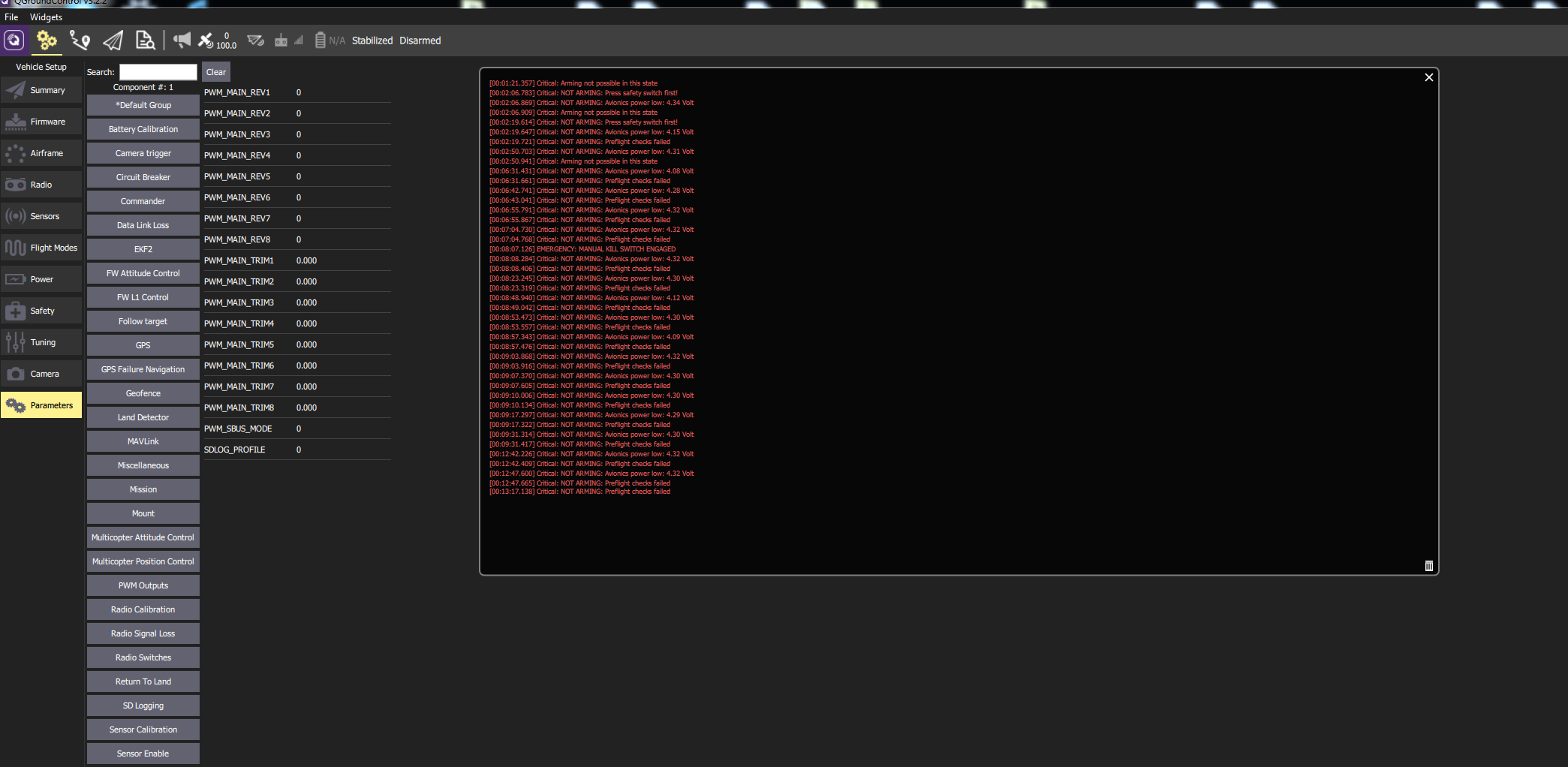
I have a rather large hexacopter. Pixhawk 2.4.8 PX4, powered from a power module GM v1.0 which gives me a constand 5.2V when measured. Everything seems fine until the warning
Avionics power low 4.8 (or 4.71 or such)
keeps showing up. I have switched the module and batteries and the same error keeps occuring. When I ignore the warning and arm it, the props will rotate but very slowly at low power.
Hi @marvin.
If the voltage is between 4.5 and 4.9 you ‘only’ get a warning. It will still work, but nevertheless should be looked into.
Which power module are you using with the Pixhawk 4? The officially supplied one? What else did you attach?
For the Pixracer I think we also use that combination, but I haven’t noticed any issues. Since it’s right at the limit and generally looks stable, you can set the circuit breaker to disable the warning via CBRK_SUPPLY_CHK parameter.
Thanks a lot for the answer. So these first two quads are only meant to be quick prototypes. So I am playing around with cheap hardware. The modules are from Readytosky from china. (called Pixhawk PX4 PIX 2.4.8 32 Bit Flight Controller, and pixracer). I am not sure if those are officially supplied… but probably not.
For the pixracer I tried all combinations from almost nothing to connecting a sik radio, mini osd, X4R FrSky and gps (which if all were connected caused the memory to overflow when calibrating). The aviation power low warning was consistent.
Similar for the Pixhawk. There I can connect two gps and a sik radio and no memory issues. However the aviation power low warning persists, event though I measure a good input voltage.
The power module I am using is a standard G M v1.0 http://ardupilot.org/copter/docs/common-3dr-power-module.html also from china. I tried two different ones.
Where does the chip measure the input voltage? On the pixracer the two middle wires of the powerport are not connected.
Thanks for the input with the warning. However, my goal is to build a larger, stable filming drone that is redundant and safe (with better hardware later on). Is it still safe running on the low voltages (or presumably low voltages)?
You find the pinout here: https://docs.px4.io/en/flight_controller/pixracer.html. The 2 middle wires are for battery voltage and current sensing. I don’t know where the 5V is measured internally.
If you want to build a larger and reliable drone, I suggest you use high-quality and officially supported components, even for prototyping.
Thank you @bkueng. The problem has solved itself when powering the pixhawk through the motor 8 power and ground pwm port.
Yes. Given that I have not been in drones for 7 years I am not up to date. How do I tell what is officially suported? And what is not? Given most parts are from china I have a hard time.
is there any way to suppress these warnings and be able to arm the drone anyway? My batteries are fully charged but still the problem persists. I have checked it with other power modules, cables and batteries.
Hola,
tengo el mismo problema de potencia de avionica baja en un controlador pixhawk 2.4.8, efectivamente cuando mido el voltaje en la pixhawk es menor a 5 Vcc, conecte un regulador en puerto riel con LM317 suministrando los 5,3 Vcc en la pixhawk como bateria redundante, desconecte el power module y funciona, no se desconecta la pixhawk, sin embargo con ambas fuentes conectadas el powermodule no informa las lecturas de voltaje y corriente que deberia informar… por lo que la pixhawk no arma por otros mensaje…por cierto se cancelo el error… de falla “potencia de avionica baja”…este es mi primer drone armado y siempre fallo el GPS no entregaba lectura de satelites, cambie el primer clone por un radiolink SE100 neo M8N pero no detecta satelites… este post abre la posibilidad que el problema de mal funcionamiento de GPS sea de alimentación a la pixhawk, pero estoy dando palos de ciego… alguien ha probado conectar dos powermodule en paralelo?.. o bien alguien sabe que power module debo adquirir… lo que he encontrado es el V.1 existe otro que funcione con las pixhawk clones sensibles a la fuente de alimentación 5,3 v gracias por su ayuda


 )
)