Hello all
I am using a 250 drone with 1806 motor, 3s battery.
I found a problem of taking off.
The attached is the log of a flight.
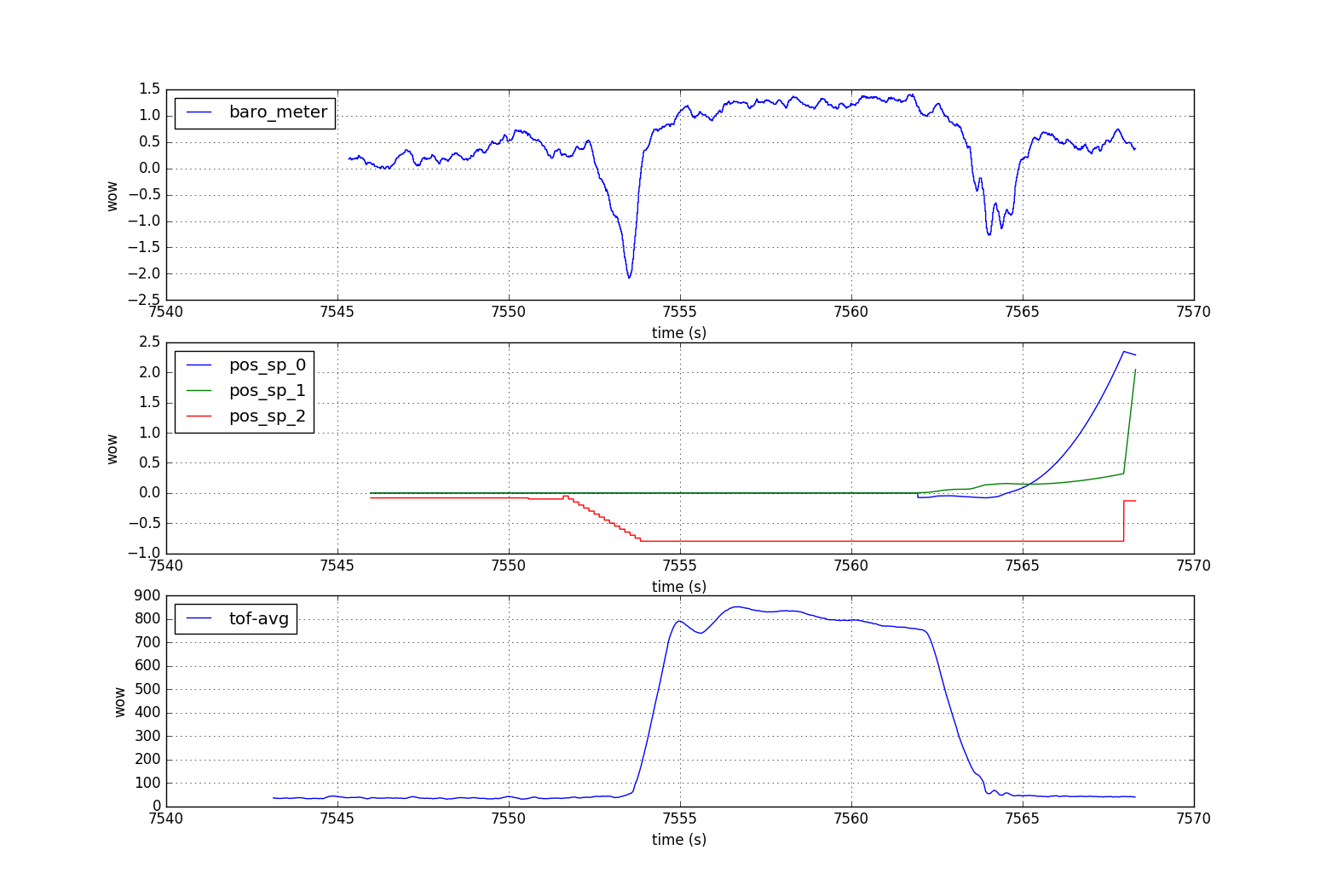
pos_sp are position_setpoints(in meter), tof-avg(in mm) is a tof sensor to detect height, which is pretty precise.
So every time I send the takeoff command, the barometer would have a deep drop and then go back to normal. The same pattern happens when landing.
I wonder if it is related to battery management system, due to the huge current while taking off.
Or any other possible reasons?
Thank you.