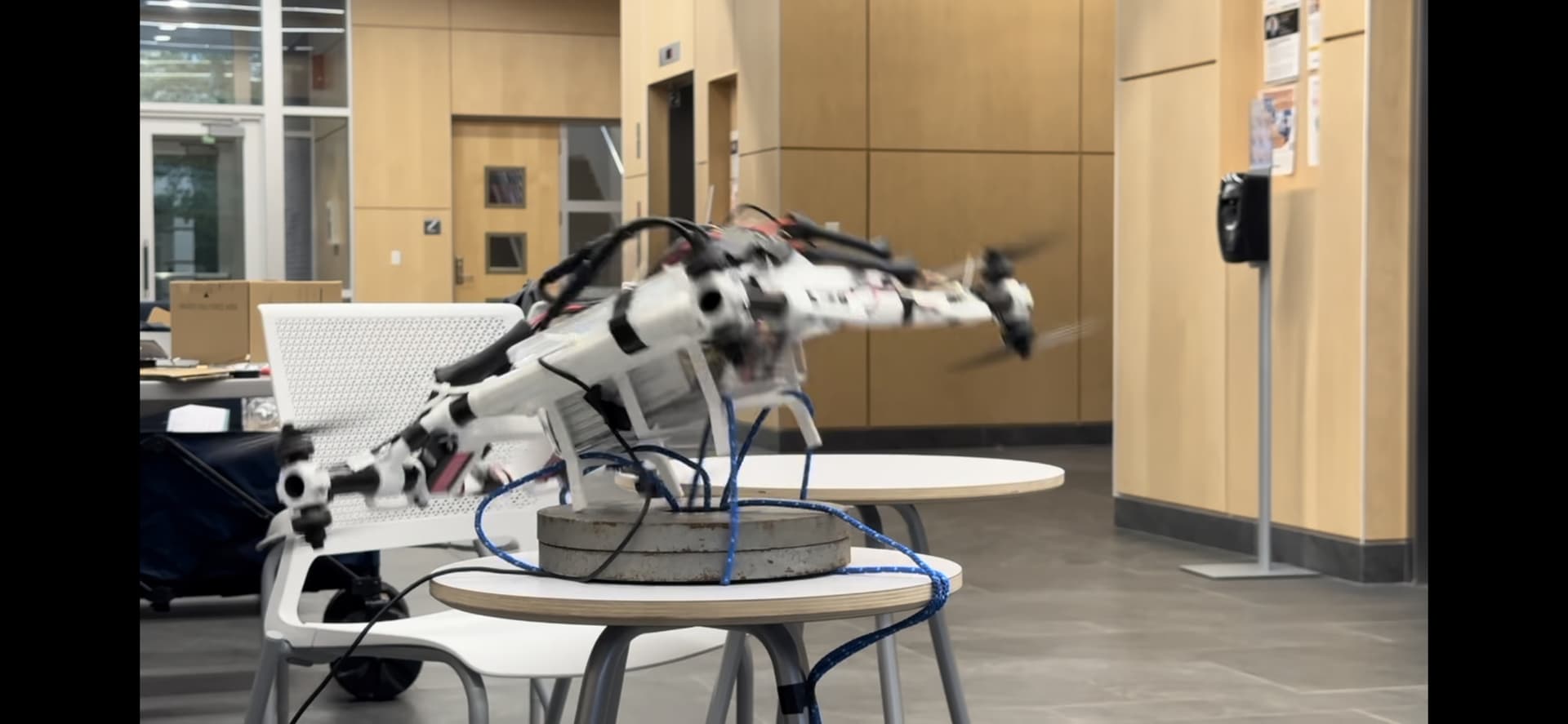
I tested my DIY drone with pixhawk 2.4.8 as its flight controller, and it didn’t take off smoothly. Using FlySky radio controller and a FS-I6AB receiver (MODE2). I attempted to climb by pushing the throttle stick up (ch3), but only the rear set of motors spun up causing the drone to tip over as shown in the picture. Any clue what causing this problem?
I think the gyro is not working properly if the drone didn’t even attempt tp level off from the unintentional pitch maneuver. I noticed in the PID tab, the set point is not at 0 degree for the, is this normal?
also, I didn’t go through the step of assigning motor in the actuators tab on QGroundControl, but the motor are plugged correctly into the main number.
Usually, you must provide throttle pitch roll simultaneously with newly built drones and specifically untuned drones. With my VTOL, I had to provide pitch down all the time initially, but after tuning it, it flew upward only with throttle.
Check the frame you selected and whether the motor number and rotation are correct. This is a crucial step before flying the drone for the first time. Do it without propellers. Perform ESC calibration also if you are using a PWM signal.
Thank you so much for all your replies!
For the tuning process, do I need to have my pixhawk plugged in to QGroundControl?
You should have a telemetry connection to tune it while flying. If you want to tune after landing and checking logs, you can connect it to your laptop and change PID gains.
I tried tuning like what you suggested, but I found the problem is that I have the thrust direction of my motor set the opposite. so I was able to fixed the incorrection gyro. But now I can’t get the drone to fly up, one side would stop spinning when I give it some throttle input. I attempted to calibrate the esc but it keep giving me the error telling me to remove the battery, but I don’t have any battery connected except by a USB cable that is required to connect my laptop to the pixhawk. Any suggestion?