Hello everyone,
I am trying to modify the flaps switch into a three position switch. This is because I want to differentiate between normal flight mode, take-off and landing. Each mode has different flap positions, elevator trim increment and symmetric aileron deflection (this only happens during landing to make sure that the flaps stall earlier than the ailerons).
llo everyone,
I am trying to modify the flaps switch into a three position switch. This is because I want to differentiate between normal flight mode, take-off and landing. Each mode has different flap positions, elevator trim increment and symmetric aileron deflection (this only happens during landing to make sure that the flaps stall earlier than the ailerons).
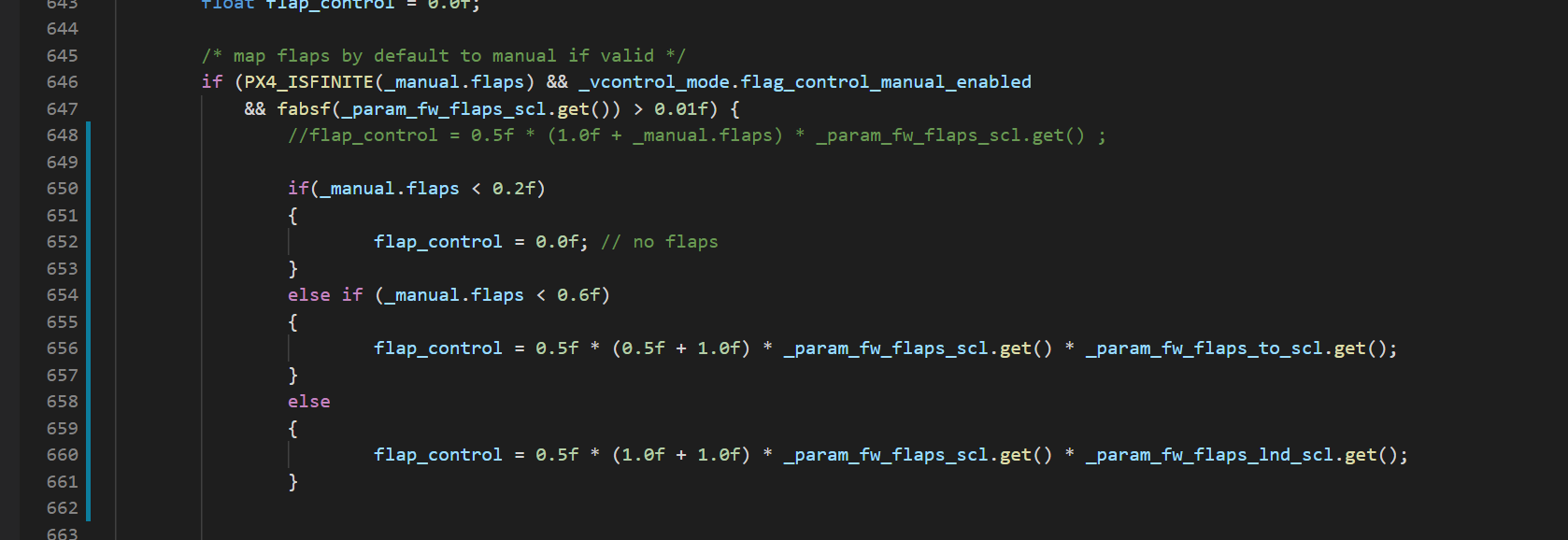
Initialy I thought this would be really straightforward and the only thing I had to do was to change the Firmware/src/module/fw_att_control/ FixedwingAttitudeControl.cpp file. The changes in the code can be found in the attached figure.
The thing is I get the requested behaviour of the flaps when I look at the actuator_control_0 channel 4 in Qgroundcontrol (signal is between 0 and 1). However, the servos does not move at all. The mixing of the flaps is done similair to that of the Borematic Maja.
Anybody an idea why the signal of actuator_control_0 channel 4 is not actually mapped to the output port of the flaps?
here my actuator_control_0 channel 4 time output (I go to all three positions of interest)
