Greetings,
I am attempting to set up a PX4 to log data from a Zubax Myxa ESC running Telega 1.0 firmware, using Cyphal protocal. Pinging @PavelKirienko as requested from our email communication.
In brief, I want to use a different autopilot to send PWM commands to the Myxa ESC, and use the CAN1 port on the Myxa to send flight data (I.e. Voltage, Current, RPM, ESC Temp, and Demand Factor) to the PX4 for analysis post-flight. (This is only a workaround for initial testing, and is not intended for normal use).
I have the Myxa functioning correctly on the airframe and thrust stand, and I can subscribe to its various data topics through yakut for monitoring in a Linux terminal, so I believe the Myxa is set up appropriately.
The issue I am seeing occurs when I attempt to view the data from either the Pixhawk log files or from a Mavlink terminal. As far as I can determine, no ESC related topics appear in the “uorb top” list. When I used UAVCAN, esc_status provided the information I was looking for, but that does not appear here. What am I doing wrong?
In terms of my setup on PX4 and QGC, I am using the newest PX4 main with the cyphal fixes merged, and QGC v4.2.4.
My QGC Cyphal parameters are as follows:
Cyphal_Baud is set to 1000000
Cyphal_Enable is Enabled
Cyphal_ID is 1
UCAN1_BMS_ES_SUB is -1
UCAN1_UORB_GPS is -1
UCAN1_ESC_PUB is 1103
My Myxa uavcan ids are as follows:
uavcan.node.id: 3
uavcan.sub.readiness.id: 65535
uavcan.sub.setpoint_rat_torque.id: 1101
uavcan.sub.setpoint_velocity.id: 1102
uavcan.sub.setpoint_dynamics.id: 1103
uavcan.pub.dq.id: 1000
uavcan.pub.dynamics.id: 1001
uavcan.pub.power.id: 1002
uavcan.pub.temperature.id: 1003
uavcan.pub.feedback.id: 1004
uavcan.pub.status.id: 1005
uavcan.pub.compact.id: 1006
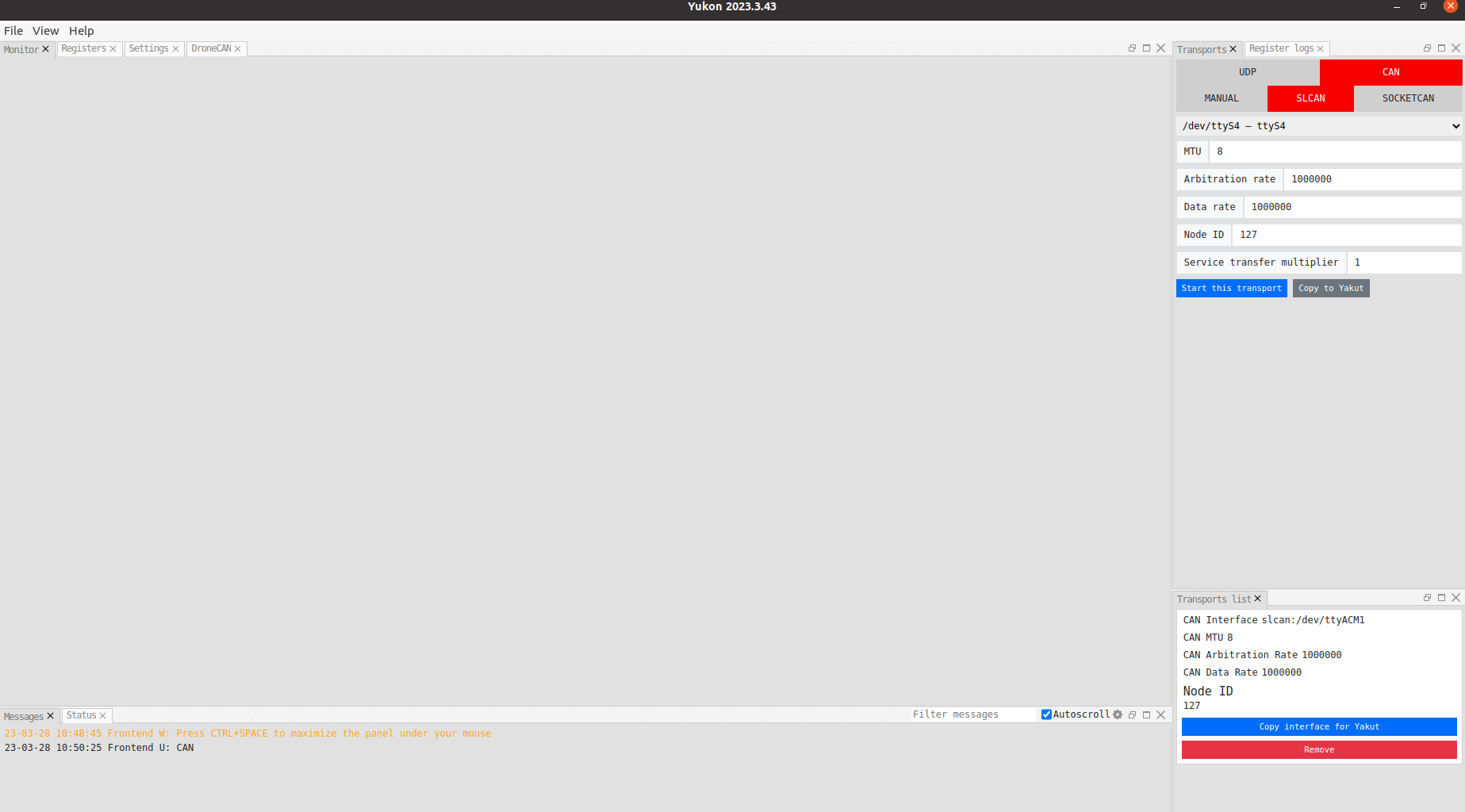
As a side note, the Cyphal/Px4 integration guide mentions modifying px4 settings through the Yukon interface, however when I start the slcan transport for the usb node connected to the PX4, it displays a blank monitor rather than listing published topics.
PS: I tested changing UCAN1_ESC_PUB to 1101 and 1102, each start moving the motor erratically without any input, so my assumption is that these were incorrect topics to be used in this field.