Hello.
I did a flight test after setting the px4 firmware 1.13.0 version in QGC today. The flight test was conducted after flying indoors in stabilized mode.
After replacing with a new propeller, no particular singularities were found when conducting flight tests indoors.
After that, we conducted an outdoor flight test and conducted the flight in position mode.
During the outdoor flight, my F450 drone took off as the yaw turned about 90 degrees to the right as soon as it took off, and when the yaw was returned, the aircraft left.There was a tremor to the right. I kept hovering to watch the tremor, and I made no progress, so I landed. After landing, the compass calibration was carried out again, and when the aircraft was taken off, it continued to flip over.
In my opinion, there may be a hardware problem apart from the GPS problem.If you know the solution to this problem, please reply.
I will attach the log record below and other necessary attachments.
Interior flight log record
- https://review.px4.io/plot_app?log=34468592-8eca-4712-aade-621cd0f299d9
- https://review.px4.io/plot_app?log=352a0728-2c0b-4556-9183-7024110e4721
- https://review.px4.io/plot_app?log=294bad86-81ce-4b0a-9e23-fcb06082518a
Record outdoor flight log
- yaw turn
https://review.px4.io/plot_app?log=0e206098-e0c5-4010-afb0-5e331de69eec
2.Flipping
https://review.px4.io/plot_app?log=653b0a36-8c5b-41b8-b46b-b11939dc82cf
https://review.px4.io/plot_app?log=c11ce919-4e6e-425b-be00-00842ce3b210
https://review.px4.io/plot_app?log=4ed7d360-abf4-41ea-be61-28cfe09ebefd
https://review.px4.io/plot_app?log=3c8d7f19-50df-4493-b74a-b1bad7a9914f
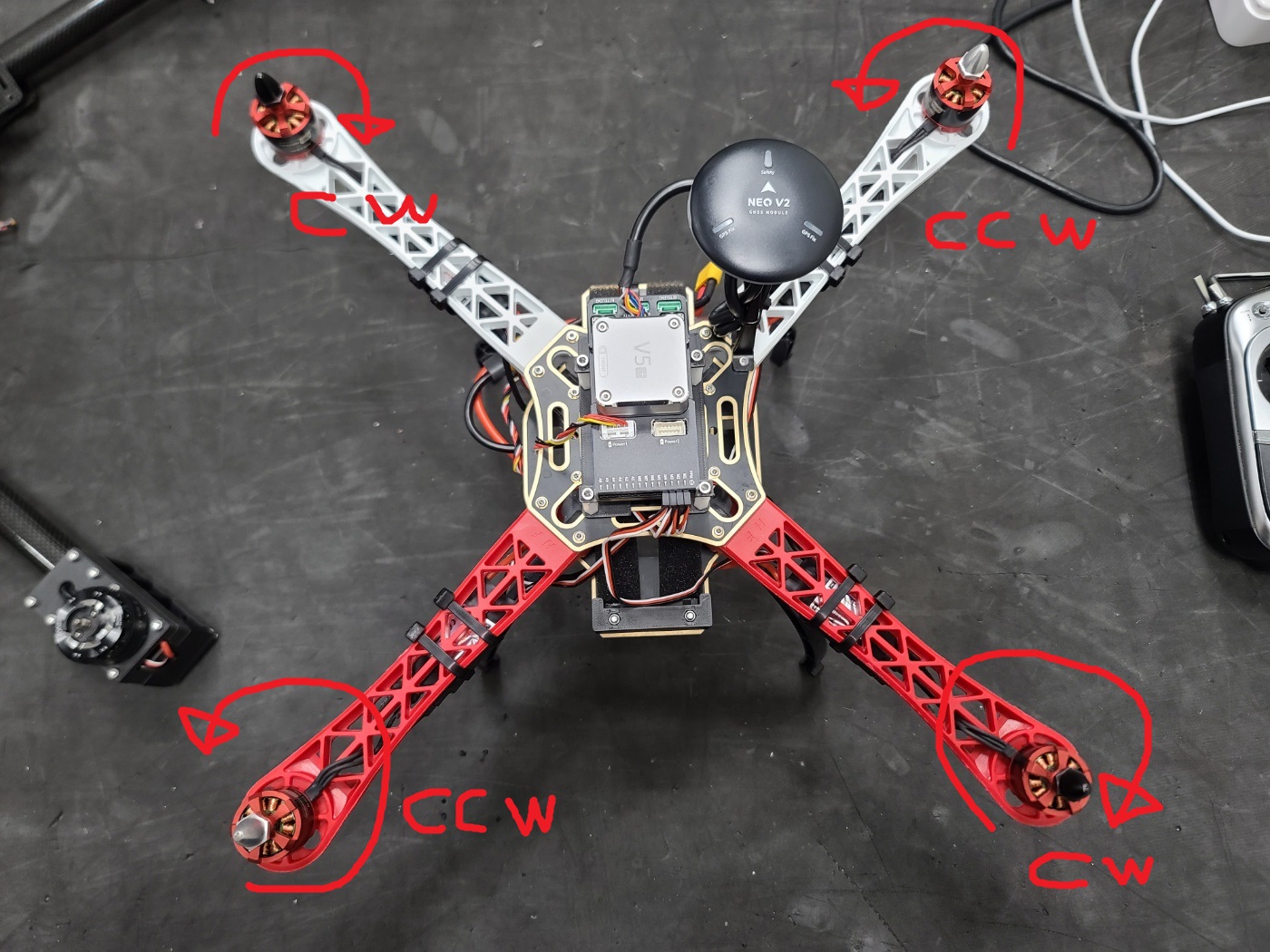
F450 Drone(The motor uses T2212-920KV)
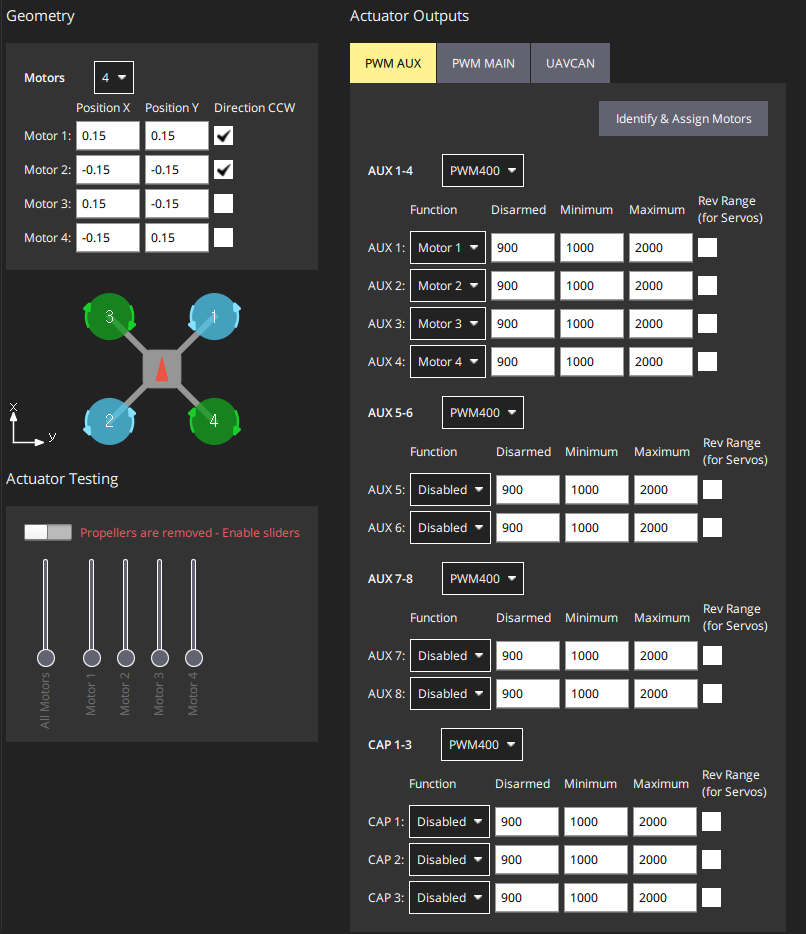
Current QGC actuator status
I also have an additional question.
First, if I watch YouTube when I proceed with the compass calibration after resetting the firmware in QGC, is it correct to proceed indoors and then do it again before the outdoor flight?
If the above method is wrong, please let me know the exact method in detail.
Second, if there is a way to change the compass setting to external in QGC and change the compass number 1 to the compass sensor built into the GPS, please = let me know.
Thank you for reading the long article, and if you have experienced and solved the above phenomenon, please help us.