After updating the firmware to 1.13.3 by QGroundcontrol.

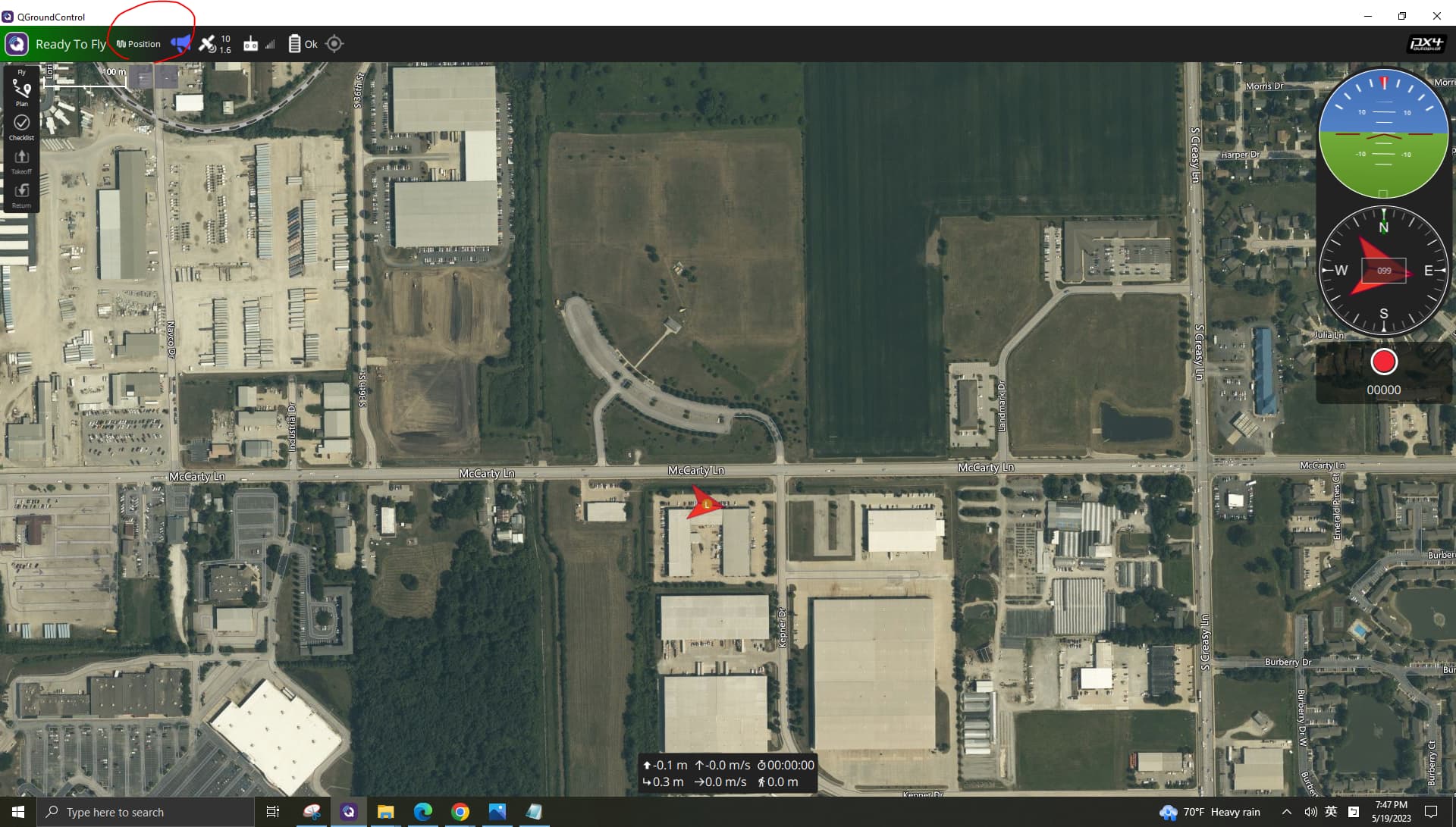
The QGroundcontrol keeps showing the mode “Stabilized”, and cannot switch to the mode “Position control”
In the past, the drone should change to “Position control” mode automatically.
When trying to switch “Position control” mode, it shows the error
"Switch to mode “Position control” is currently not possible . check for a valid position estimate "
After recalibrating, upload firmware, and reboot, the error disappears.
However, the drone still cannot switch to the "Position control " mode.
The drone only can use “stabilized” and "manual " modes now.
It is wired that the light of GPS keeps red and purple.

However, I tried two different open locations and detected 10~15 GPS satellites.
The number of GPS should be good enough for “Position control” mode.
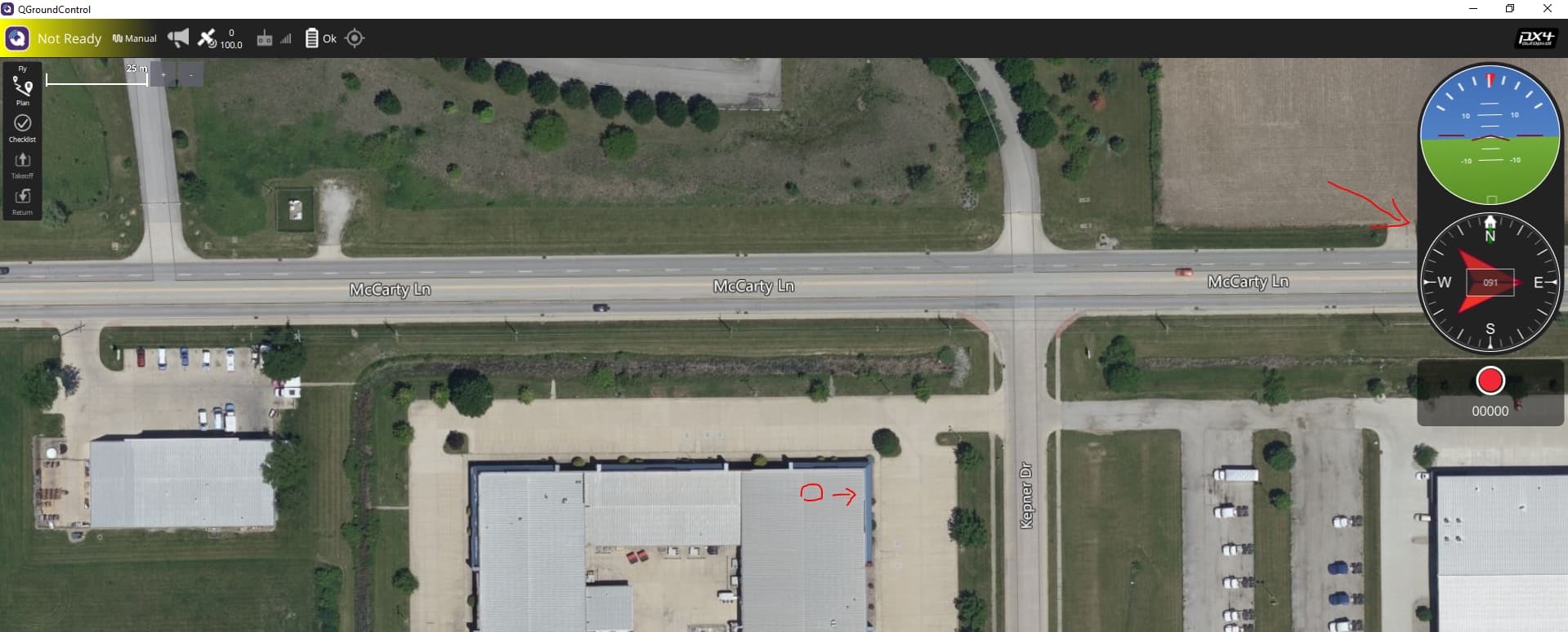
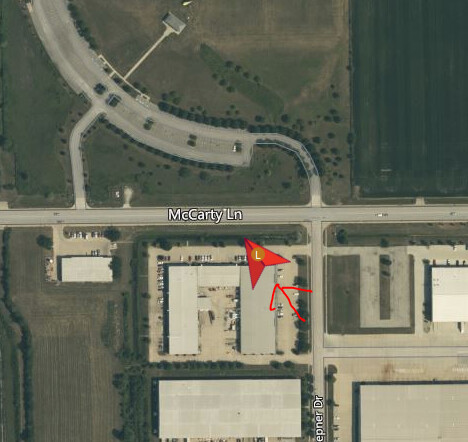
Moreover, the heading of the drone (red arrow) becomes wrong.
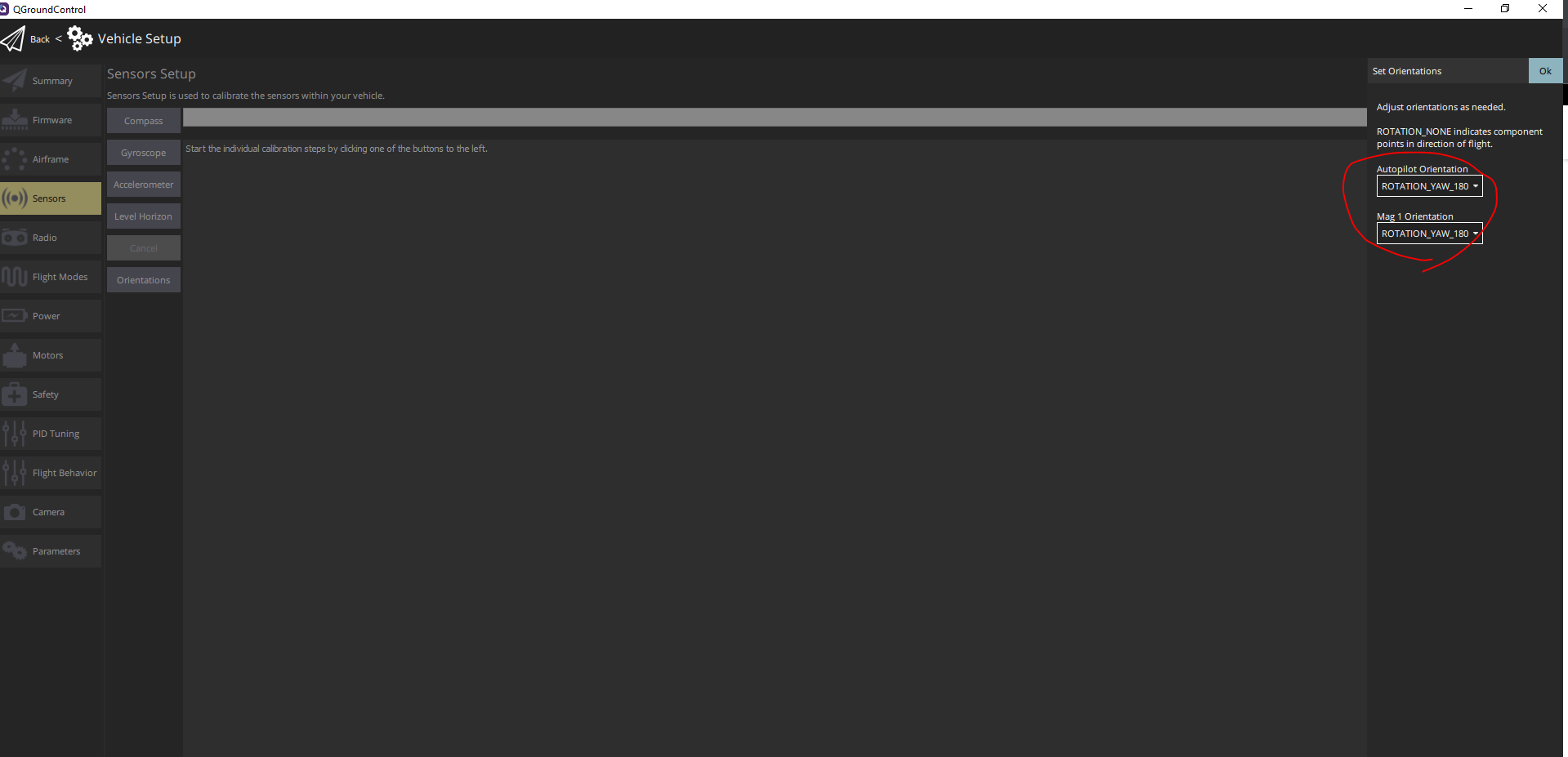
The red arrow is 180 degree different from the PX4 flight controller, even though I already calibrated compass, gyroscope, accelerometer and level horizon, again.
I also tried to change “ROTATION_YAW_180”, but it still cannot work.
Before updating the firmware,
I remember that the light of GPS should turn green automatically and then allows for “Position control” mode.
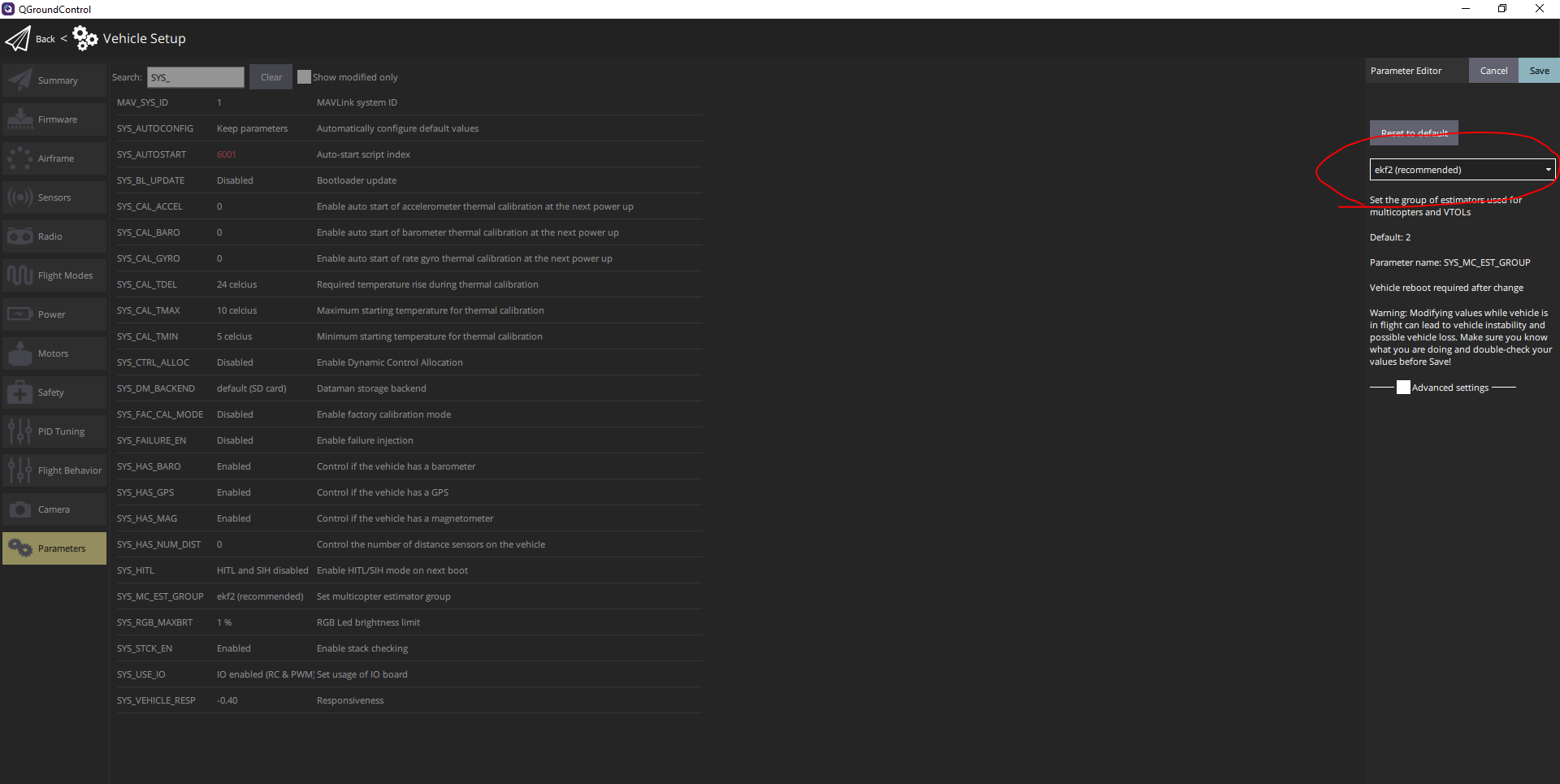
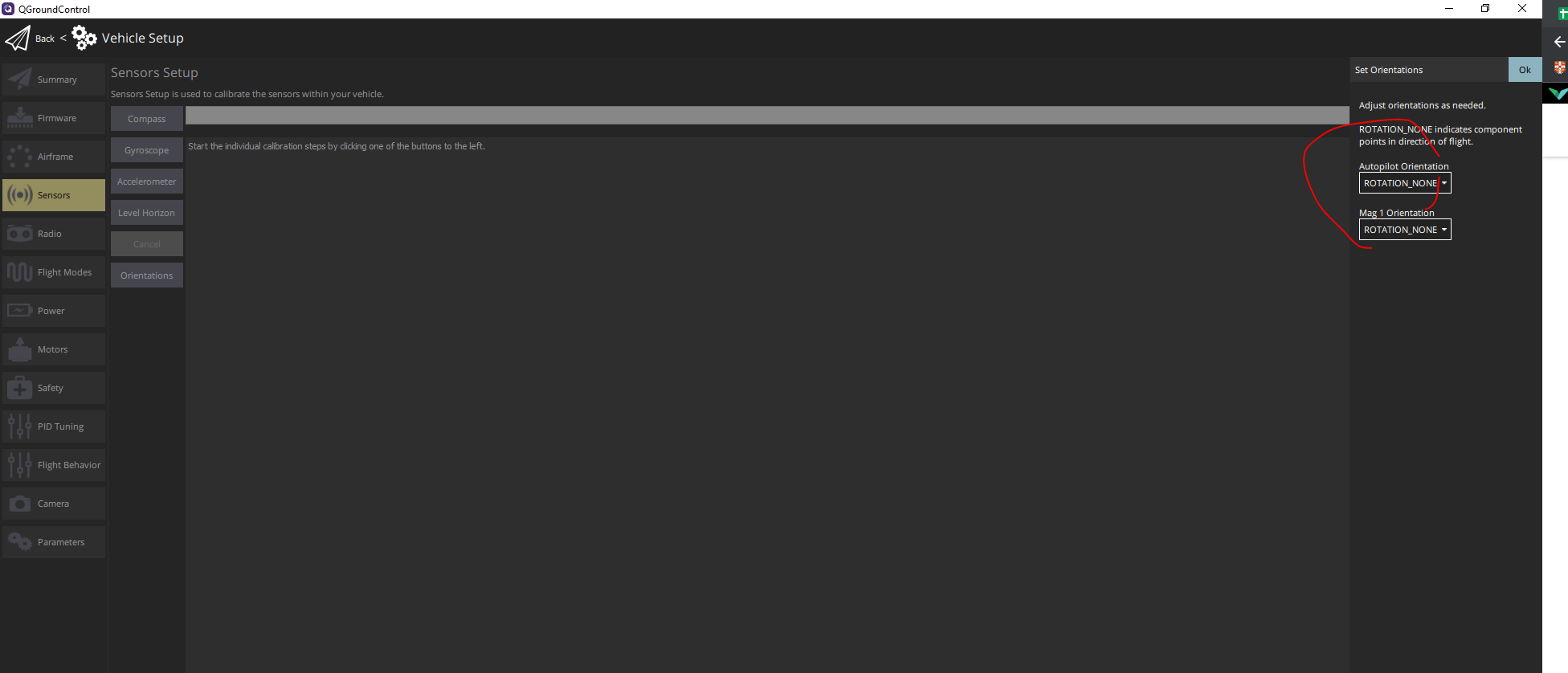
The orientation was “ROTATION_NONE”, and the heading is correct as same as PX4 flight controller.
One possible reason may be
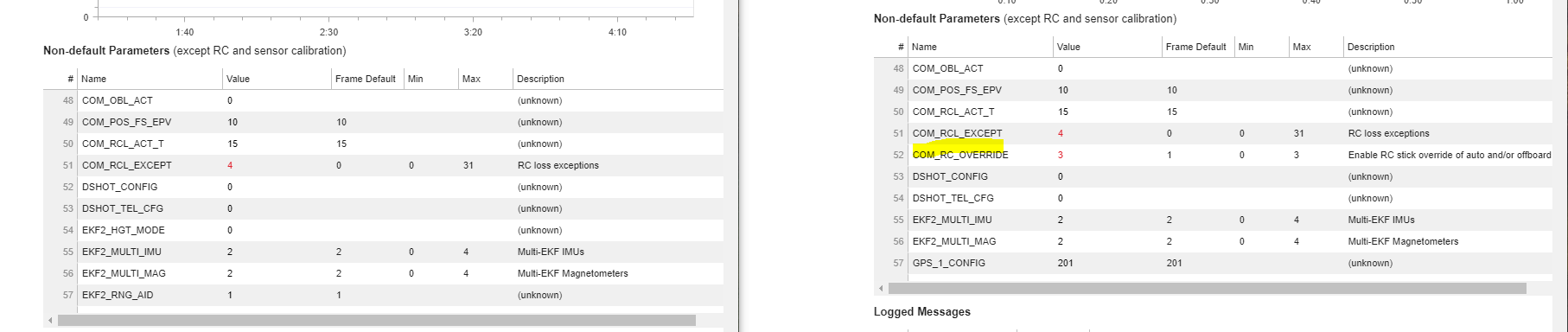
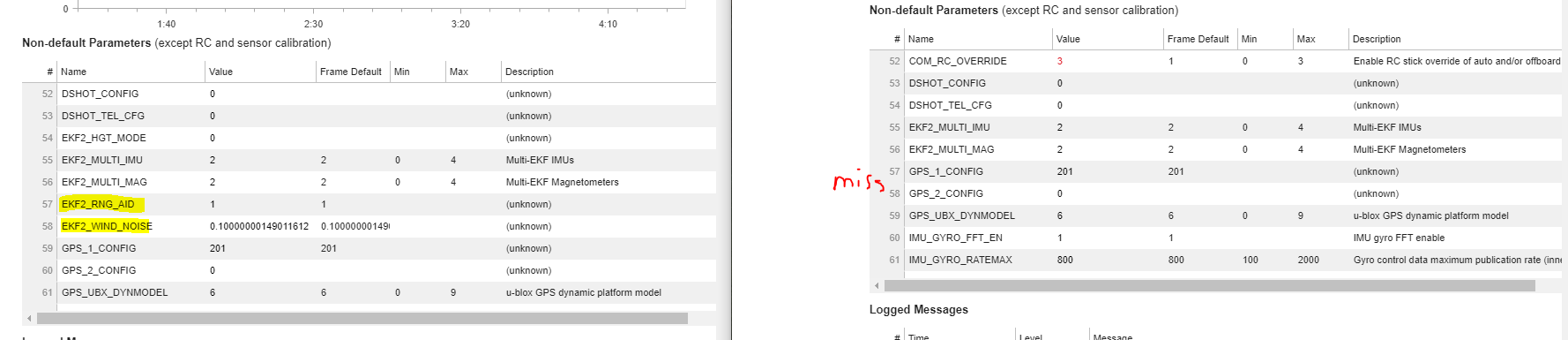
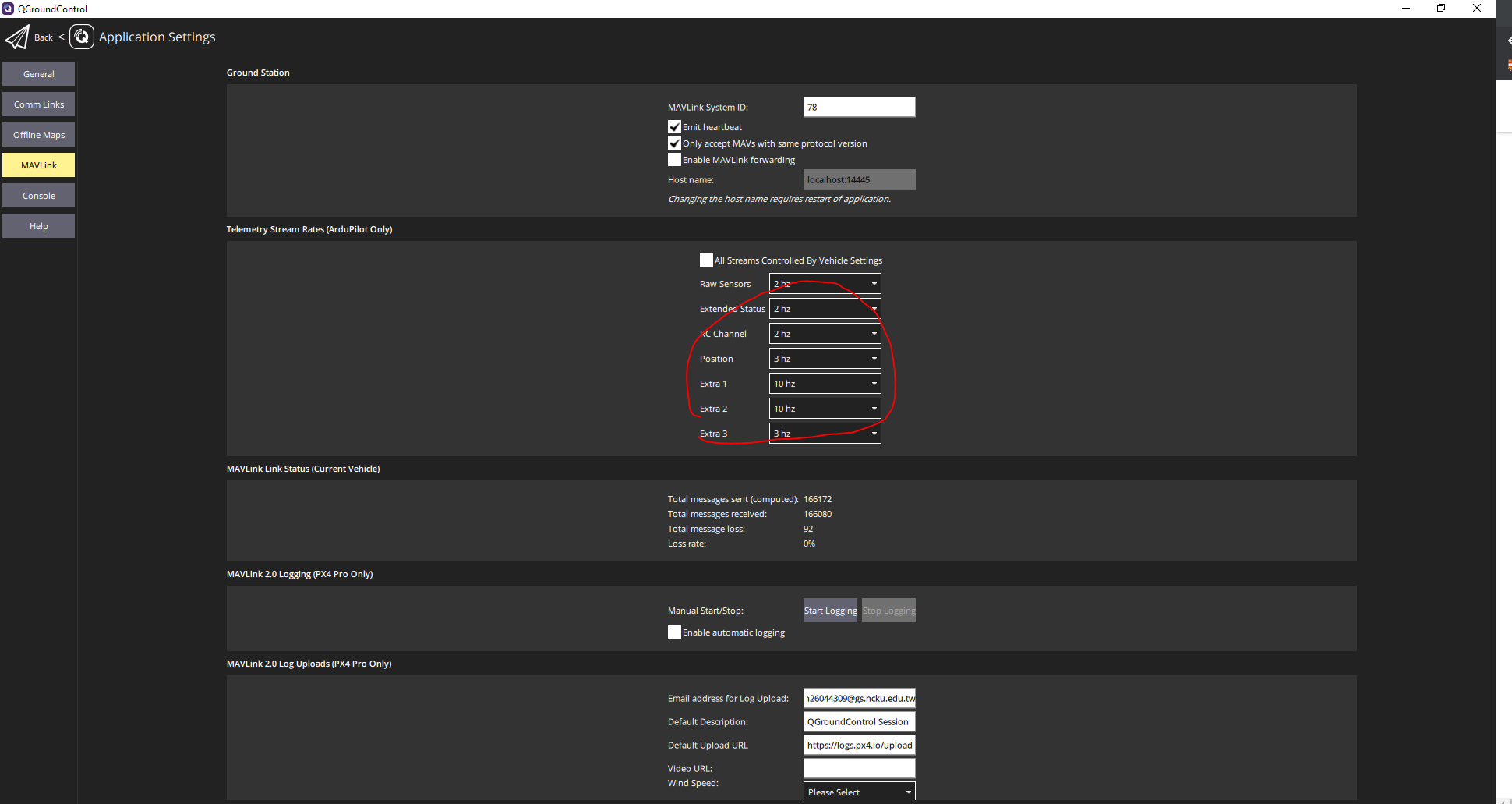
Yesterday, we tried to update the sampling rate of the IMU and lidar-lite by QGroundControl.
However, we already change all parameters back to the default.
QGroundControl version is v4.2.1
There is the log file.
Thank you very much for your help.
By the way, if indoor, the compass (red arrow) will be correct.
180 degree reversed compass happens outdoor