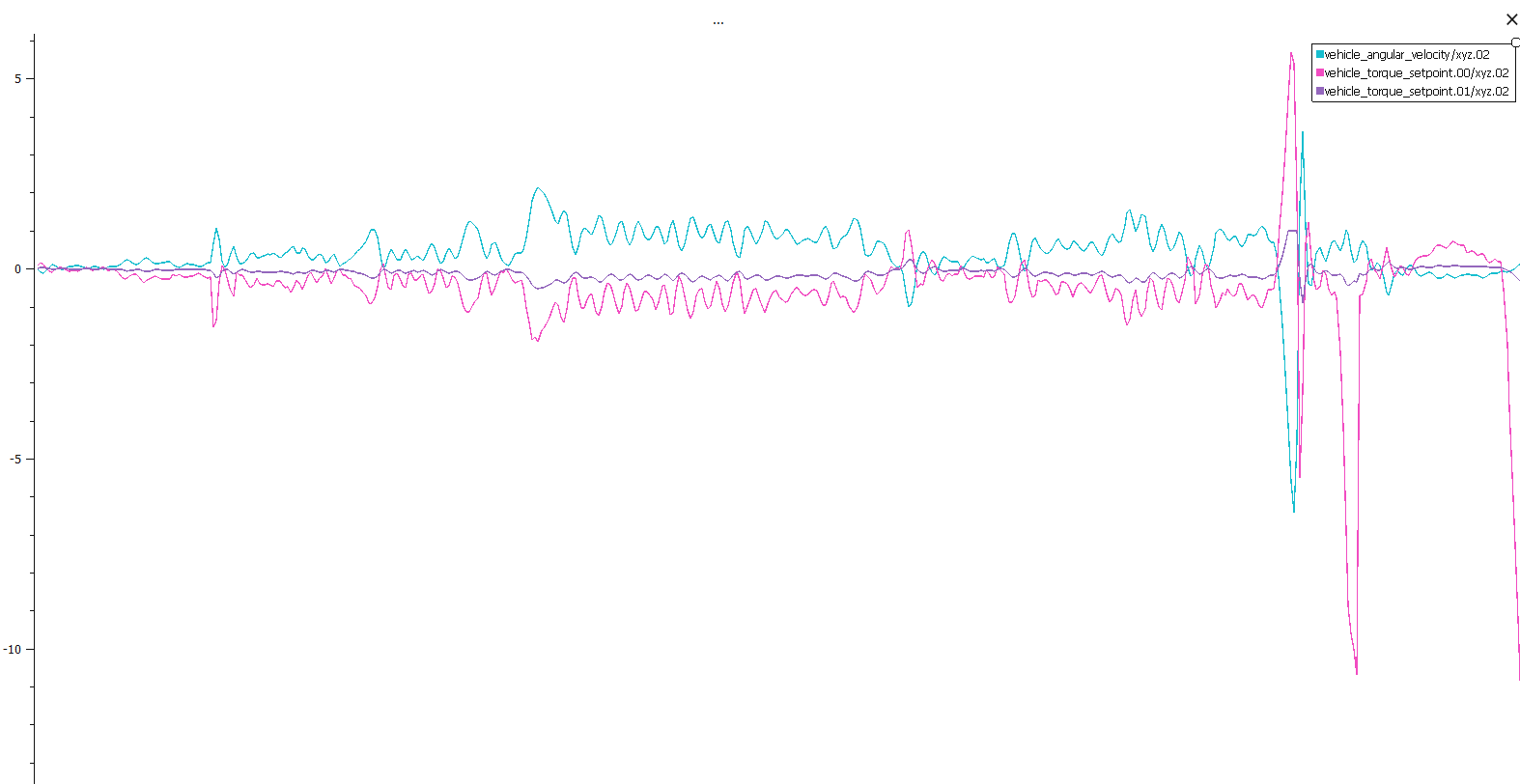
In my flight logs I can see two different torque setpoints, I assume one is meant for the motors and one is for the control surface actuators. I have selected generic VTOL tailsitter as my airframe type but I only have a single motor. This means that it should only be used for thrust and not for yaw control. However, based on the logs, it looks like the yawrate setpoint is being sent to the motors instead of the actuators. I’m assuming this because the yawrate setpoint plots I’m seeing for the actuators don’t make any sense. Is it possible to fix this issue in QGC or do I need to edit the control allocation files?