Hello there!
I am completely new to PX4 and QGroundControl, it’s also the first time I and my friends build our own octocopter. We have a pretty common problem that is still unsolved yet: the drone starts spinning when the drone is ready to take off. If we increase the throttle it spins faster. We suppose that it’s a yaw problem, so we try several solutions found on the internet, like recalibrating the ESCs, raise the GPS higher, checking the motors wiring or swapping the rotation direction of the propeller. But these do nothing. When we scan through the tabs of Vehicle Setup, in the Tuning tab we find out that when the response of the yaw change, the setpoint just stays almost as stable as a line. Unlike when we change the roll or the pitch of the drone, the setpoint change accordingly. So I would like to ask if this is the correct operation of the software or we seriously have problem with yaw control ? Really appreciate if you guys can offer me some advices. Thanks in advance !
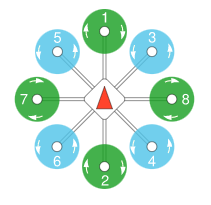
are you sure you have the rotors directions set correctly ?