Hi
I am using Pixhawk 2.1 (fmu v3), PX4 v1.10.0 and make a hexacopter
I had a problem during test with out propeller
Only a few motors rotate in test
I read log and found some problems

Yaw setpoint was change but i did not control my radio controller
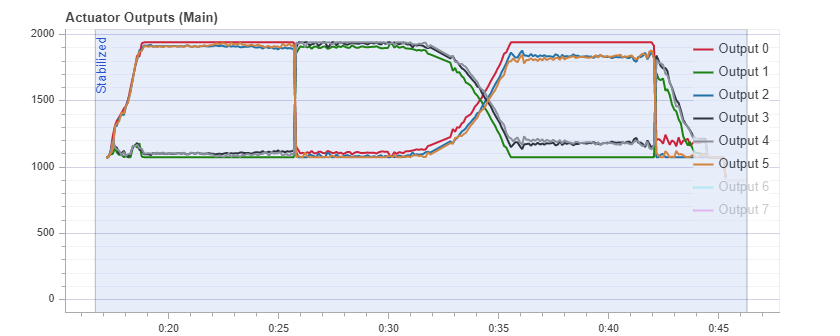
and Actuator Outputs is very strange
I know controller had some trim but if it had trim yaw set point will same direction
Here you are the link to the log
https://logs.px4.io/plot_app?log=98fecf6f-0da8-47a8-84be-fc3a1a3c7bfb