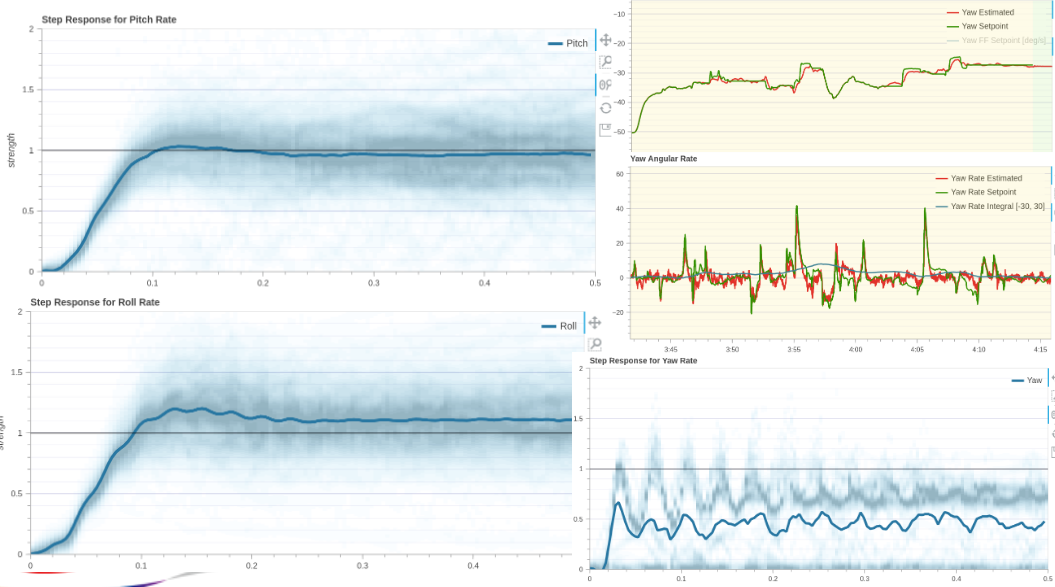
Seeking help from online experts to tune PID in px4_log. While there are no issues with the pitch and roll axes, even after adjusting the P gain for the yaw axis to its maximum limit, the yaw_axis_step response still doesn’t seem to be reaching a value of 1. Apart from the propulsion system itself, what other factors could be causing this problem?