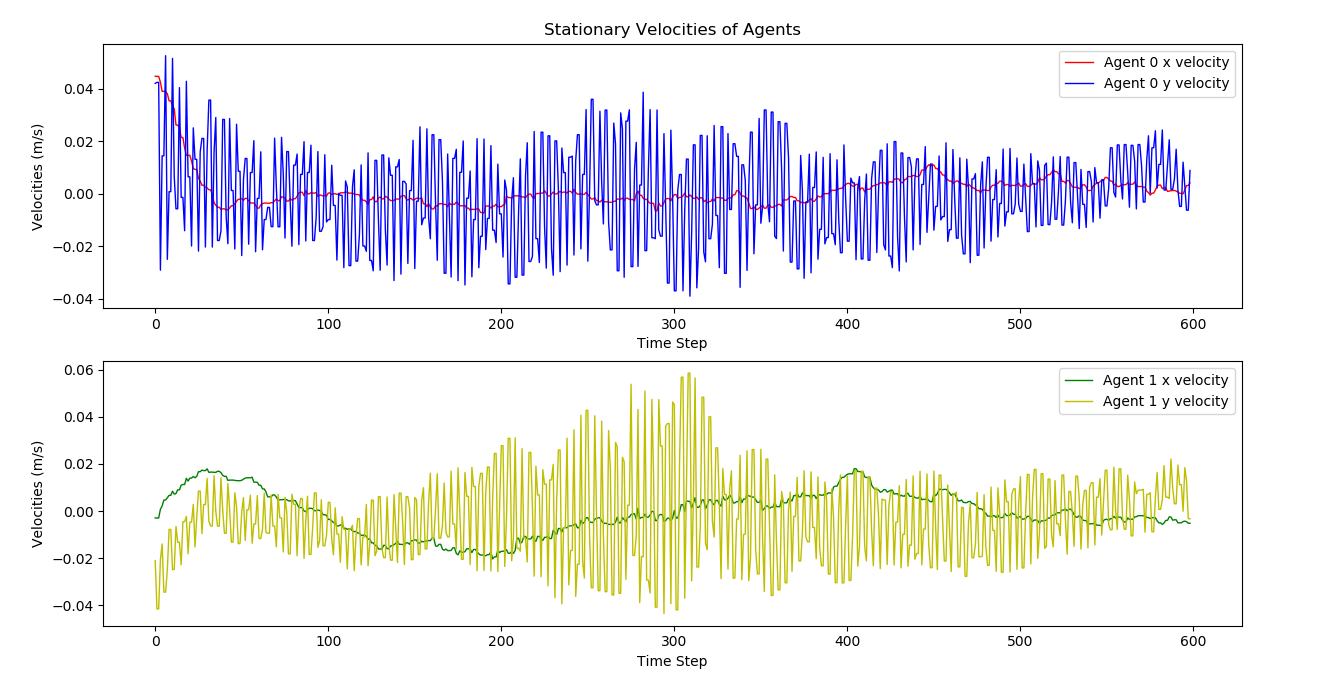
I am finding oscillations in the ‘y’ velocity of the vehicles Typhoon H480 in a SITL ROS-Gazebo setup while hovering at a fixed altitude in offboard mode.
The vehicles only show small drifts in the simulator whereas while plotting velocities from the mavros topics I see oscillations up to 0.06 m/s. I am using Local NED frame.
Why is this noise specific to y velocity?
Topic I am using:
- mavros/local_position/velocity_local for getting feedback of actual state