Hi,
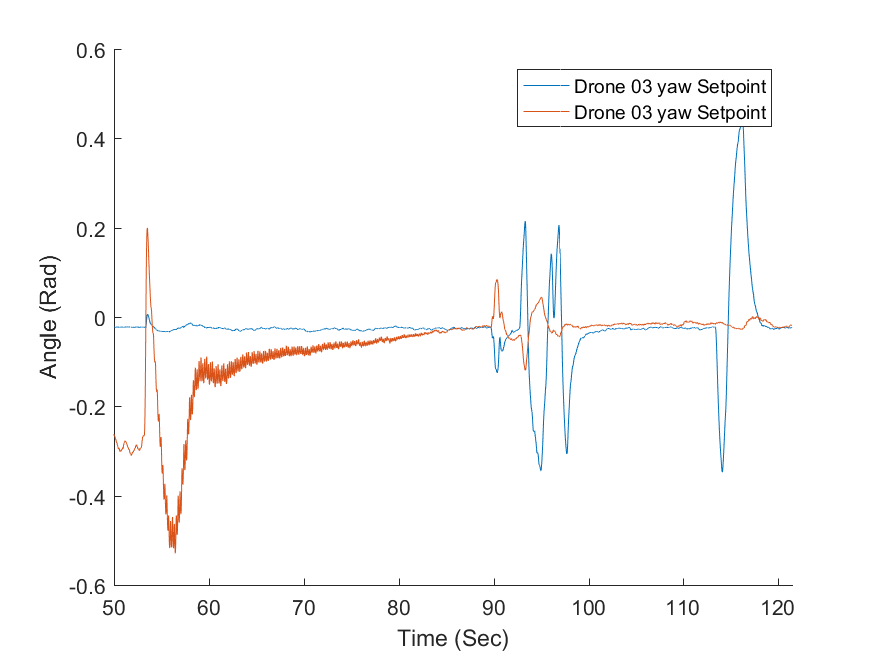
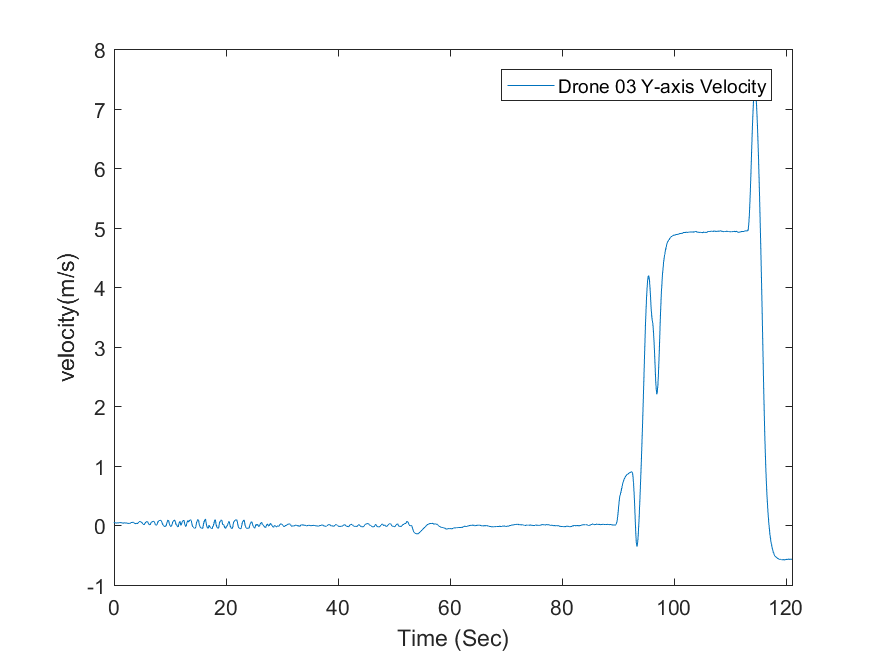
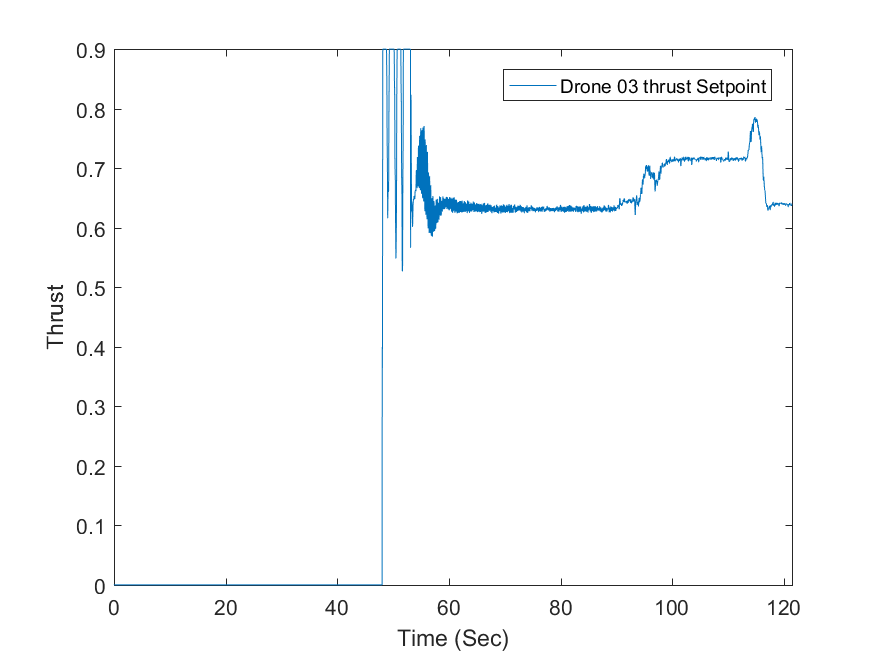
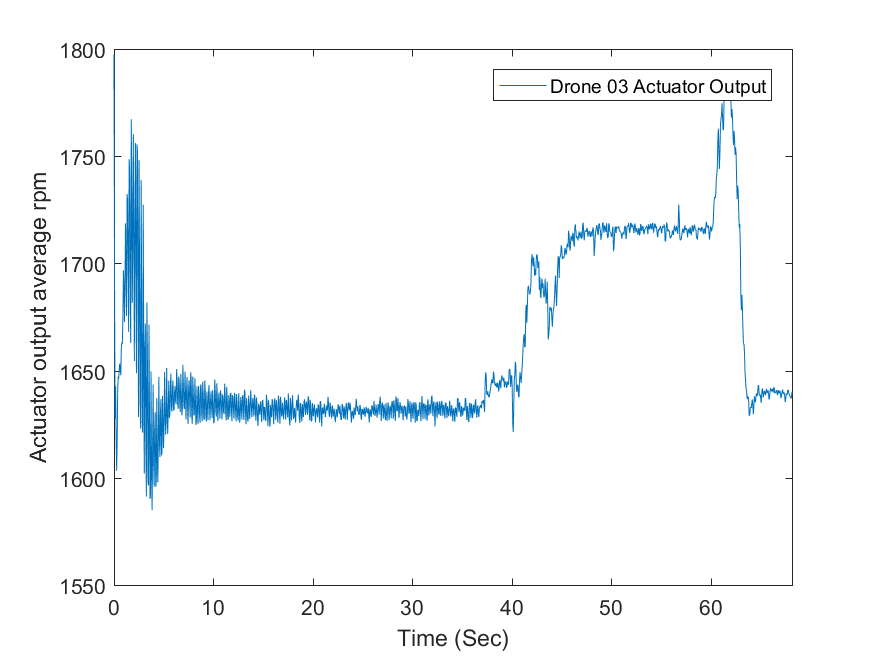
I am simulating a model of DJI F550 hexrotor using SITL px4 gazebo simulation. When I give a constant velocity setpoint, the hexrotor achieves the required velocity. In order to achieve this velocity the attitude angles increase or decrease significantly to achieve such velocity and then go back to normal. I expect the same, since there is no inherent air drag in simulator the hexrotor needs to apply force as long as the desired velocity is obtained. However this also means that for the time the hexrotor applies the force in lateral direction to move horizontally, there should be an increase in the thrust force to compensate. In my flight data, I observe that the normalized thrust values jump up during acceleration, however they do not go back as soon as the required velocity is achieved. Furthermore, when I look at the PWM outputs they also show the similar behavior. What I expected from the newtons fundamental laws is that as soon as the desired velocity state is reached there is no need for extra thrust.