What is the cause of these strange “half sine wave” oscillations/vibrations in the position data when running a SITL Gazebo simulation? Or how can I find out what causes it?
Command: make px4_sitl_default gazebo_iris
Set 5m apart waypoints in QGC
Execute mission
Ubuntu 18.04
Gazebo 9.18.0
PX4 1.11 (I tried the master branch and it does the same thing)
This shows the vehicle_local_position.x in green and setpoint in pink:
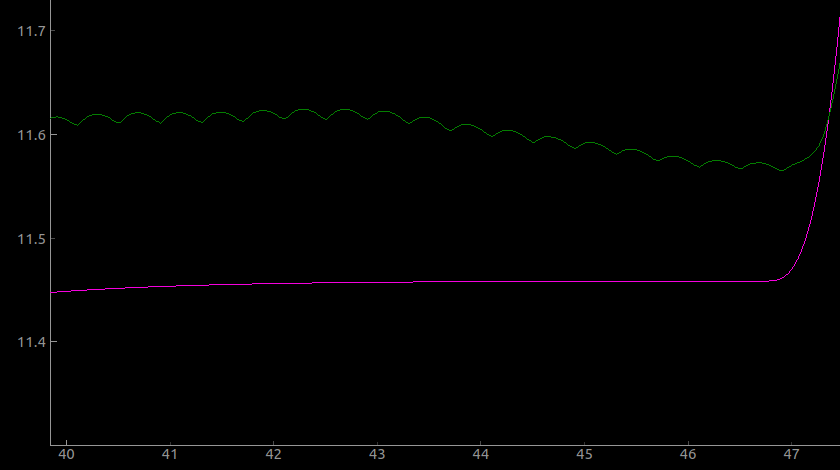
They are consistently 0.4 s apart no matter which vehicle I try.
It affects the flight performance because it causes oscillations in the velocity controller’s commanded acc_sp.
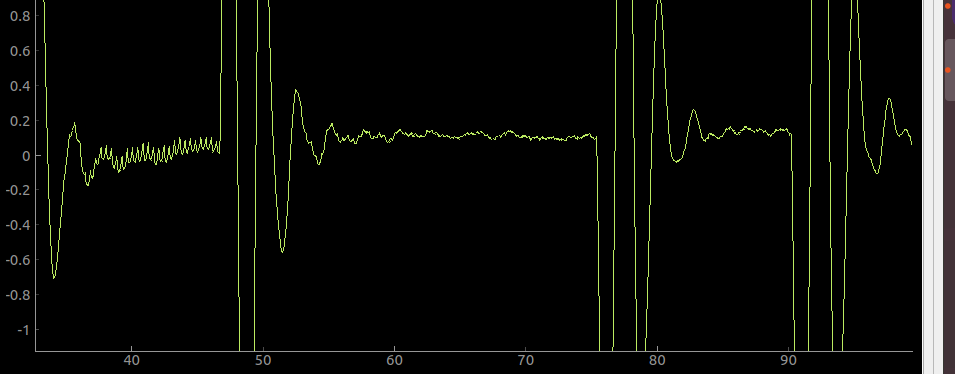
This is the x acceleration setpoint:
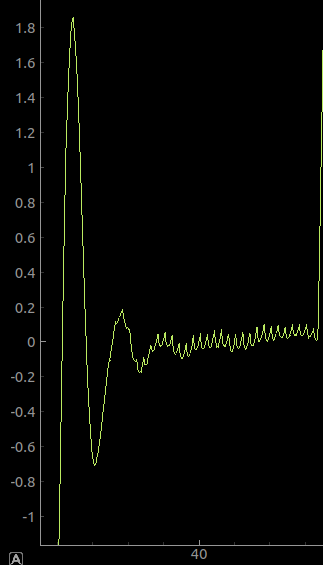
It seems to decrease later in the sim:
It is not a fault in the estimator or GPS because it is the same in vehicle_local_position_groundtruth
It is not a PID gains problem because it happens with a custom quadcopter too.
It was happening earlier this month too, but then it went away after a computer restart. Now it is staying.
Could it be a processor problem? Maybe the Gazebo solver cannot complete the calculation in time and gives the wrong result. How could I identify if it is this or not?
the .world solver parameters are set to defaults
Any suggestions where I can look for the cause?