Hi all,
I’m trying to control the yaw of a drone that is hovering in a SITL with gazebo, ROS and PX4. (The ROS <=> PX4 communication is done through MAVROS).
I’m able to switch to OFFBOARD, arm the drone, make it take off and hover (by publishing to mavros/setpoint_position/local).
When I publish an orientation to mavros/setpoint_position/local to make it yaw 180°, it does yaw in the simulation.
When I make it go back to the original yaw angle (by yawing again by 180°) it comes back to the original pose. However, when looking at the log (on Flight Review), it shows :
- A ~95° jump in yaw when the first yaw setpoint is published
- A ~95° overshoot in yaw of this setpoint
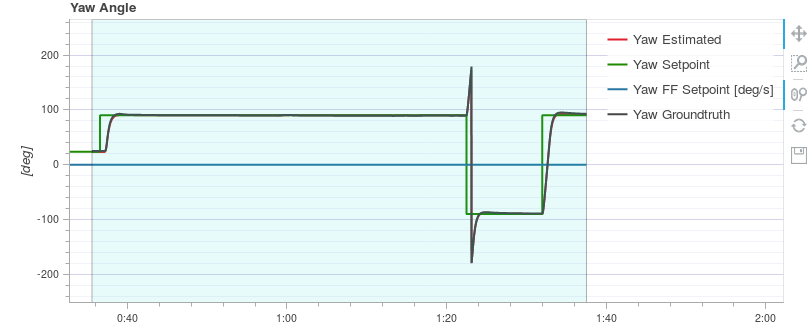
The jump and the overshoot do not appear in the simulation.
The second setpoint is followed normally (both on the simulation and on the log).
Do you have any idea why the log does not concord with the simulation ?
Thank you for your help and time