Hello,
The yaw control of my Y - tri copter seems to behave weirdly. I’m used to quads so maybe I’m just interpreting this wrong. I’m doing my tests in manual mode.
When the drone is armed, the roll and the pitch behave normally but the servo controlling the yaw seems to behave as if it was in acro mode: when I let go of the stick, the yaw keeps it’s angle. Is this normal for a tri copter or should it come back to it’s initial angle?
Also, if max yaw stick position is maintained continuously, the servo resets after reaching it’s max angle.
I tried tying the drone down and make it fly a few feet above ground. Even in the air, the yaw servo keeps it’s angle after I let go of the stick.
An interesting note is that moving the yaw’s control group to manual passthrough removes this problem:
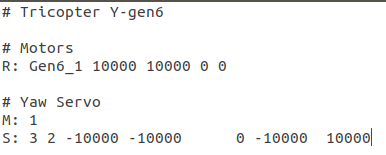
In other words, with this modification, the servo moves with the stick and when I let go of it, it comes back to it’s initial angle.
However, I would still like the autopilot to be able to manage my yaw if I switch to, let’s say, position mode.
Is the question clear and if so, has anyone encountered this problem before?
Best regards,
Frederic