Hello,
I have a rather large tricopter I’m trying to fly in position mode. It flies great in manual mode inside but I can’t risk to just put it in position mode outside, so I need to tie it up so it dosen’t end up in a tree.
The drone starts wobbling violently when it’s off the ground and tries to max yaw in one direction, then the other. It’s a rather terrifying sight.
The hardware:
-Cube Orange
-Mini carrier board
-Here link receiver
-Here link remote
-Here+ GPS
Logs:
Manual flight mode inside: https://review.px4.io/plot_app?log=d0d0055b-4998-4b3a-a7a6-28b6e3fdf7e3
Position mode outside: https://logs.px4.io/plot_app?log=31f3d126-dec5-4e34-a7ba-c4e18bdea5b6
Has anyone ever had a similar problem?
Best regards
Frederic
Hi Fred!
I haven’t used a tricopter, but just in case this helps you…
Is the weigth of the drone well balanced?
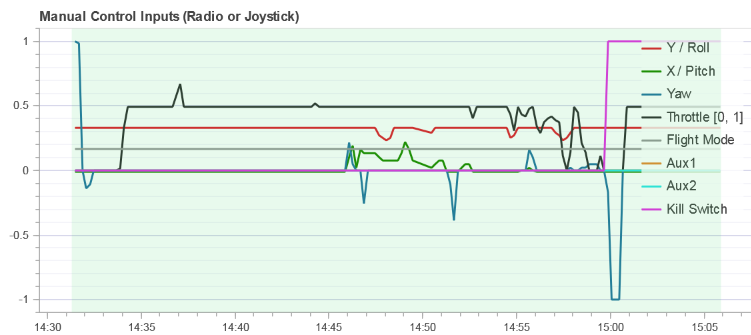
Is the RC radio properly calibrated? As you can see in the chart you are introducing a continuous Y/Roll command, and it should be equald to 0 when you are not using the stick.
The MC_YAWRATE PID values are you sure that are correct? I will use the default values untill I have a stable flight.
The system detects only two magnetometers: ID 589858 and ID 592905. Primary is 592905. Which one is the external HERE +?
I don’t know the size of the tricopter, but the vibrations seems to be a little be hight. Is the Pixhawk directly attached to the frame or is isolated with foam, double side tape or something like that?
Little tip: you have some logging dropouts. I recommend you to use a different SD card than the default one. For example SanDisk Extreme 32GB A1.
There is one thing that I don’t understand: If this is a tricopter, what is the “Output 3” in the “Actuator Outputs” chart?
Have a nice day.
Hi thanks for the response!
The weight could be better balanced in the sense that most of it should be under the main prop which is bigger than the other two rear ones. Right now the weight is a bit more far back than what it should be. It is worth noting than this is a reverse tri copter, meaning there’s one prop in the front and two in the back.
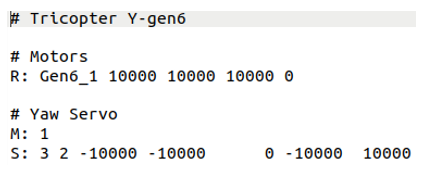
Here’s a screenshot of the mixers if it helps:
The radio is properly balanced as far as I know. The roll and the yaw are trimmed since the drone has a tendency to drift a certain way so that’s why they’re not equal to zero.
I am still working on the MC_YAWRATE PID. It is actually the main problem I realize it now. The drone spins out of control if the main prop changes speed suddenly enough due to the torque it generates.
You say only two magnetometers are detected, well I thought there was one in the cube and one in the here+ GPS. Should I have more?
Thanks I’ll try changing the SD card to have better logs!
To clarify, Output 0 is for the main motor, Output 1 and 2 are for the rear motors and Output 3 is for the yaw servos, which there are two but receive the same signal.
Thanks again for the reply!
Best regards,
Frederic
Hi Fred!
Sorry, you are right about the magnetometer quantity, I was thinking about a Cube Black that has 2.
I’m sorry but I can’t help you more because I don’t have any experience about tricopters. I hope you can resolve that soon. 
Regards!
Hello Retro,
No worries thank you for the advices! I’ll keep you updated on my progress.
Regards,
Frederic