Orico4
September 7, 2016, 2:31pm
1
HI,
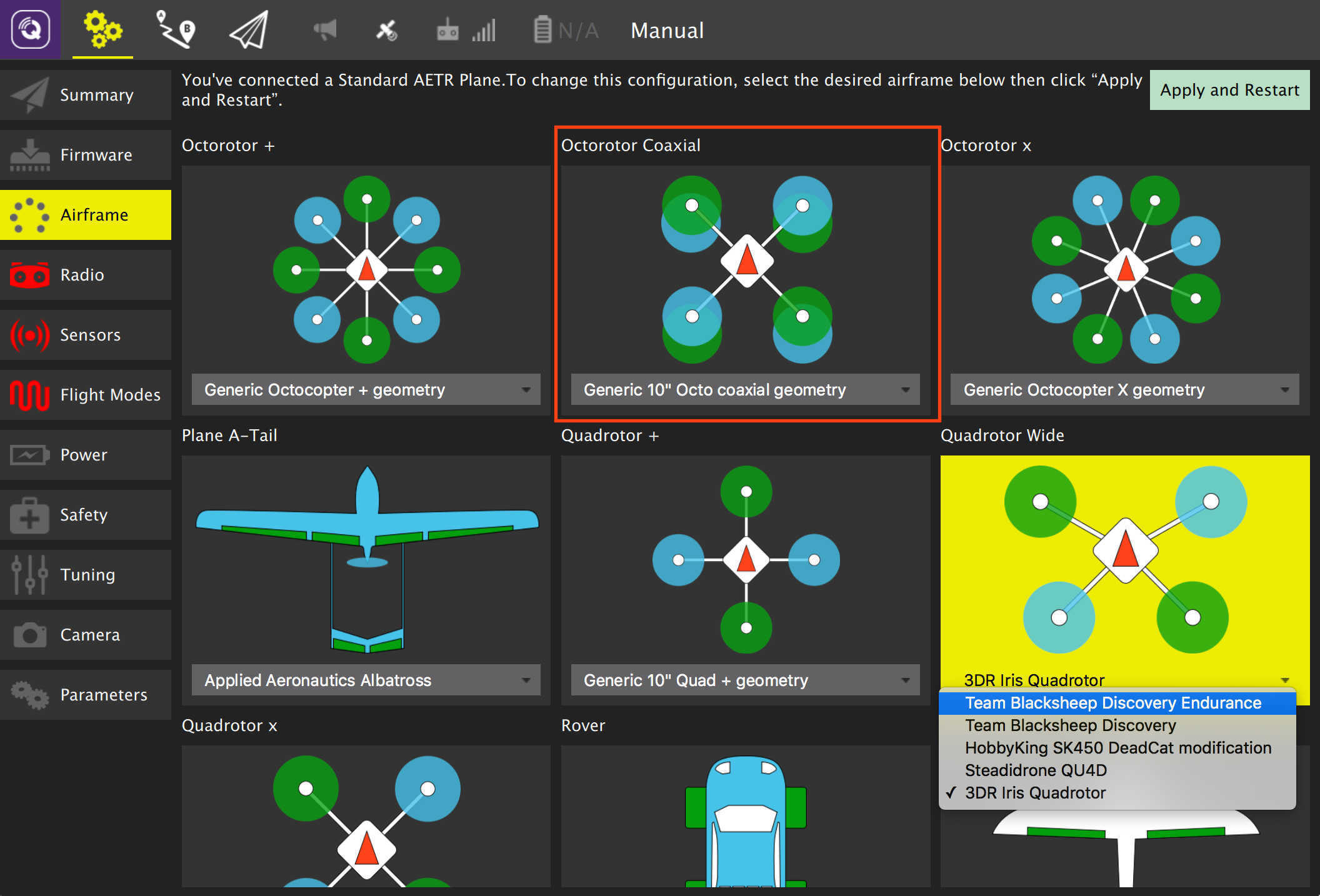
I am building a X8 frame using a MindPX flight controller, which runs PX4 stack.
In QGC i select Octorotor coaxial - Generic 10" Octo coaxial geometry;
However there is no motor map numbering on the picture. I checked px4 motor mapping document and i can see motor numbering for Quad X/+, Hex X/+ and Octrotor X/+, but Octorotor coaxial seems missing there.http://dev.px4.io/airframes-motor-map.html
I made a numbering as below, is it correct?
Thanks.
Bart
September 7, 2016, 7:54pm
2
Its all defined here:https://github.com/PX4/Firmware/blob/master/src/modules/systemlib/mixer/multi_tables.py
So I guess if you use octo_x:
octa_x = [
[ 22.5, CW],
[-157.5, CW],
[ 67.5, CCW],
[ 157.5, CCW],
[ -22.5, CCW],
[-112.5, CCW],
[ -67.5, CW],
[ 112.5, CW],
]
The numbers are degrees relative to the forward direction (positive degrees in clockwise direction).
Orico4
September 8, 2016, 9:14am
3
Bart,
Thanks for the direction.
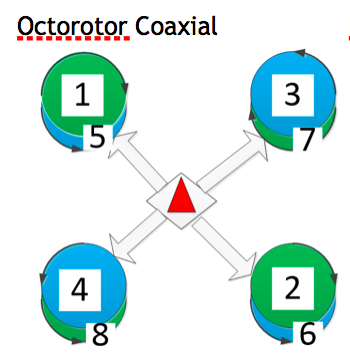
I am using coaxial frame (octo_cox), so according to the code, the numbering should be like this:
I will test flight it tomorrow!
Bart
September 8, 2016, 2:58pm
4
The figure you made is not correct.
Orico4
September 9, 2016, 8:04am
5
Bart,
Sry but I don’t get you. In multi_tables.py,
X8
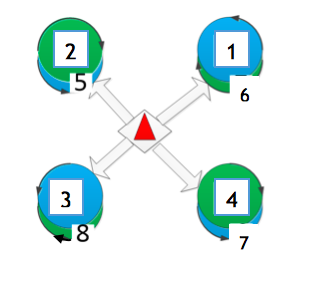
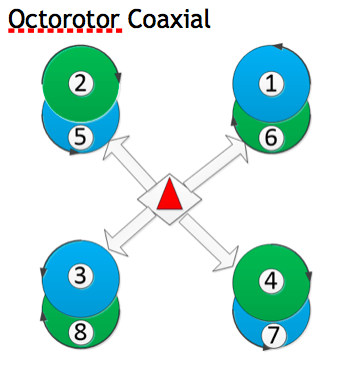
So according to this the picture i made should be correct?
Below is the same pic as above, just slight adjust on style.
The X8 frame now looks like this. It is a 350mm frame, pretty small.
I did not fly it yet, just tested by holding it with my hands. The pitch/yaw/roll feels OK.
Will do more testing when have time.
Thanks.
Bart
September 9, 2016, 10:46am
6
I’m sorry, I confused octo_x and octo_cox. You should be fine, good luck flying
Orico4
September 10, 2016, 6:47pm
7
No problem Bart. Thank you for the help.
It’s really a happy flying!
Hi,
Does the OCTO COX COPTER setup provide a better flight performance than X Quadcopter . Can it survive if any of the motors fail during flight. What about the battery efficiency