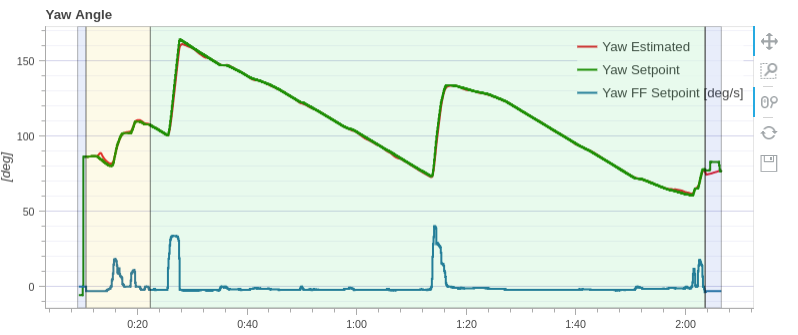
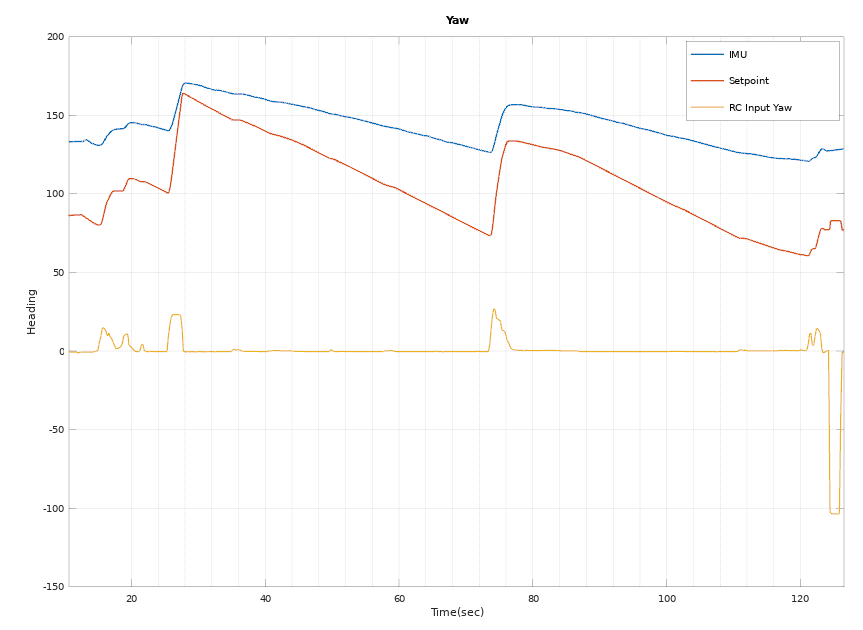
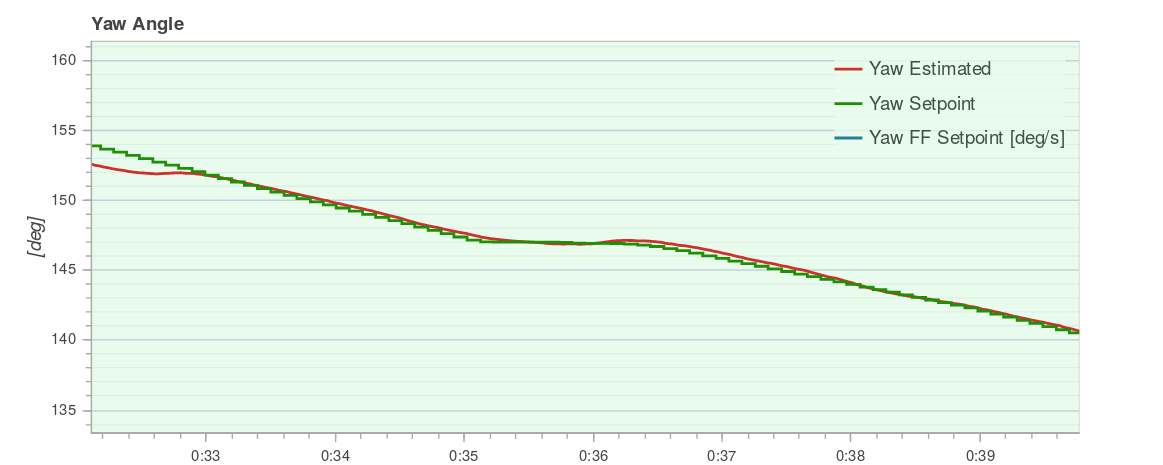
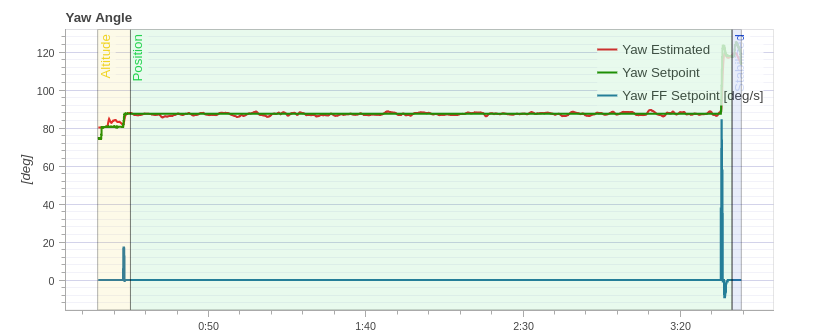
I noticed the magnetic field around the area is not so good but it does not explain setpoint is moving.
Even if the magnetic sensor is off by certain amount, setpoint should maintain it’s initial setpoint.
Is this intentional behavior?
Can anyone experienced this issue before?
@bresch Thanks for letting me know about this.
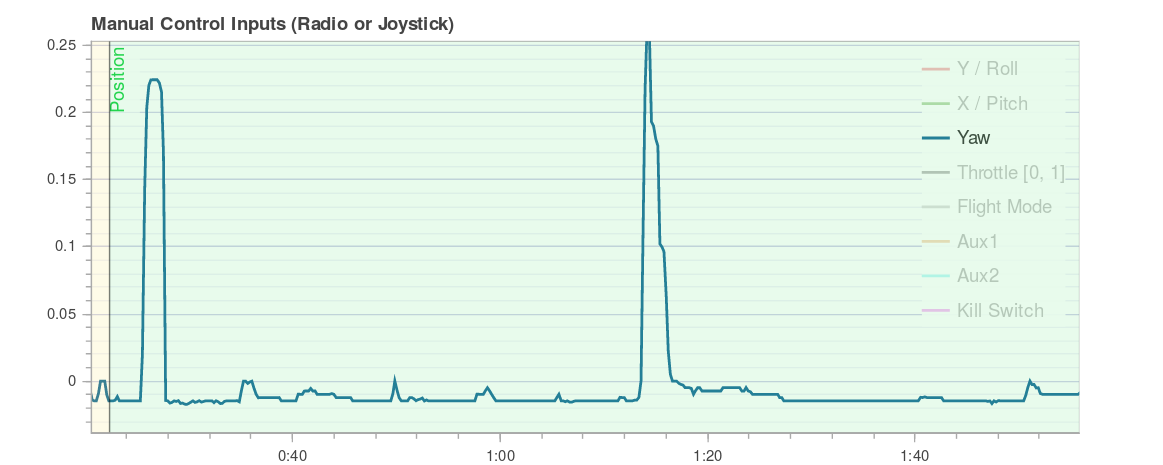
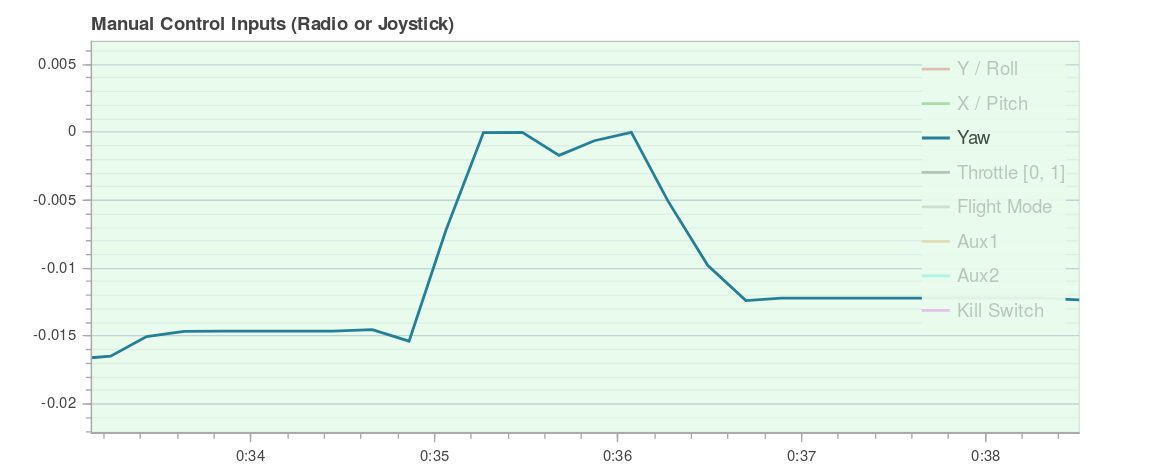
I re-calibrated several times but not resolved this issue and only manually trimming the radio worked.
I thought deadzones are exist to mitigate or filter sensitivity of radio input however was not big enough.
Good to see that you fixed it. I never checked the RC calibration so I don’t know exactly why it fails in your case. You can try to manually set the RC trim for the yaw stick (one of the RCx_TRIM parameters).