Including return mode.It looks like it could happen with GPS.
GPS is NMEA.
I am a novice and not good at analysis.I hope someone can help me.Thanks.
Power module current data is not trusted.
Including return mode.It looks like it could happen with GPS.
GPS is NMEA.
I am a novice and not good at analysis.I hope someone can help me.Thanks.
Power module current data is not trusted.
I don’t see anything obvious in the logs.
Could you post a video of the wobbling so we know exactly what you mean by that?
Also iy might be helpful of you posted a log of the drone just hovering, with no control inputs.
I don’t know what iy is?
Can you see 3D view?
You can see the rocking of the plane by 3D view, which is almost identical to what I actually see.
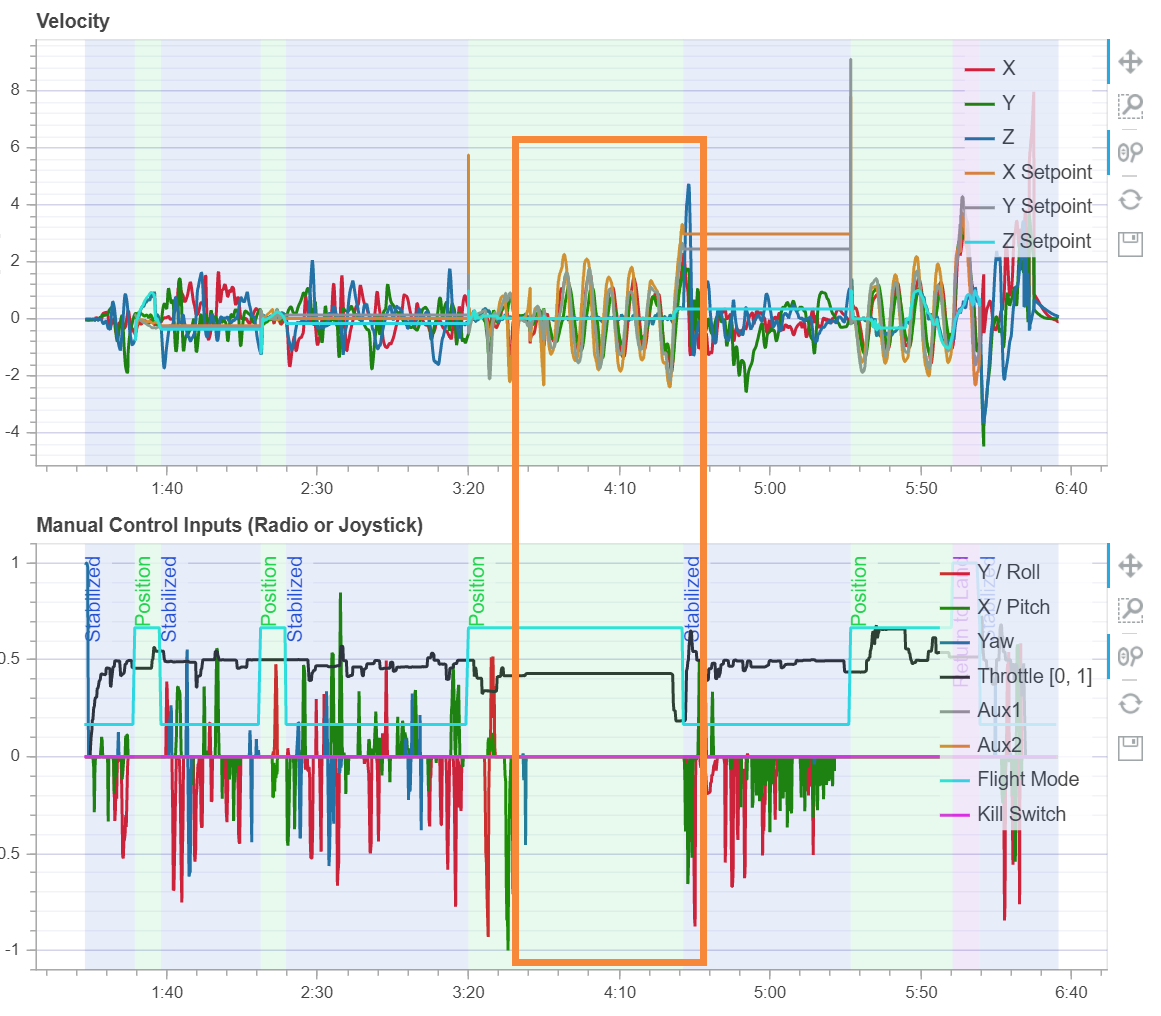
What I found strange was that after I switched to position mode, the plane swayed from side to side without control input. This seems to have a certain law.
For example, between 3 minutes and 45 seconds and 4 minutes and 20 seconds in the log.
The log finally showed that the plane shook greatly because of the crash. If you really need a video, I’ll try to make one. 
Sorry, my mother tongue is not English, with the help of translation tools. 
The set points are changing, and the drone is tracking them.
The only difference between stabilized and position mode is the GPS is used or not.
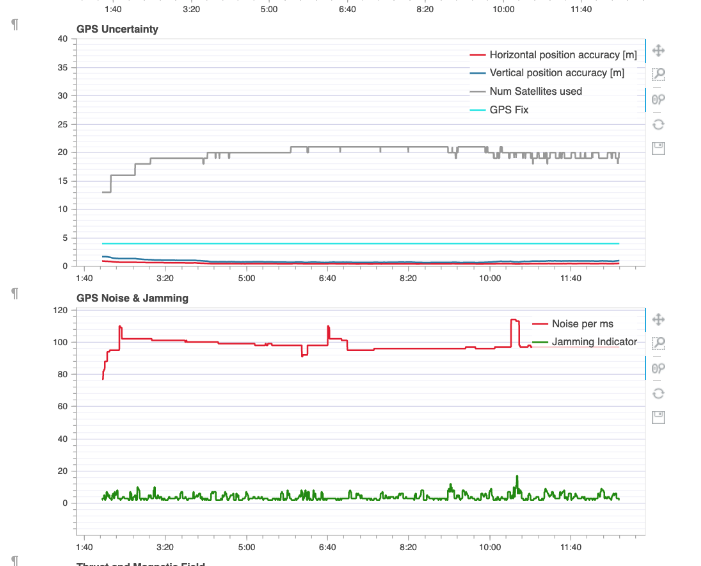
There is something up with your GPS. In your log the GPS charts are basically blank. You should see some noise.
Typical from a drone that flies well:
The It also could be one of these parameters:
https://docs.px4.io/v1.11/en/flight_modes/position_mc.html
Yes, I used QGroundControl to view the GPS status, and I found it always displayed
INFO [gps] status: NOT OK
Even if it can be seen from the feedback information that it has extracted information such as longitude and latitude from NMEA statements, it always displays GPS not OK anyway. Even if I directly use the USB serial port to connect to the GPS interface of my pixhawk, and then directly send the 3D positioning statement output from my nmeagps, QGroundControl can show that the positioning is successful, but even so, the GPS status is still not OK.
I got an m8n GPS module of ublox, connected to pixhawk and switched the GPS to u-blox mode. After checking the GPS status, I found that whether the GPS has been positioned successfully or not, it is displayed
INFO [gps] status: OK
Therefore, the problem is that nmeagps displays not OK whether the positioning is successful or not.
OK and NOT OK do not indicated the state of the GPS just if there is correct communications.
It could be that you need to configure the GPS unit a certain way. If you look here you will see what I mean.
There are several message structures and perhaps your is not the expected one,
If I were you I would create and issue on the PX4 git. They will no doubt explain this, or perhaps it is a bug.
Have you calibrated your GPS for the interference caused by your motors?