A few days ago, I flied the Pixhawk4 + PX4 1.11.2, and looks good in stabilized mode and altitude mode. But when I changed the Position mode, my quad look like soo cold. It looks trembling. When I move the position any directions, it moved like a stop and go and stop and go. I mean moved not smoothly.
Today, I downgrade the firmware to 1.9.2. And every problems go away. Position/Altitude/Stabilized mode working very nice. Would you let me know why PX4 1.11.2 firmware version is not working in my case? My drone is Quad and size is around 1000mm. I think PID looks good.
My flight log is gone because of my fault. Sorry. And also sorry for my poor english. I hope you can understand my words.
Hello ,
I am under firmware 1.11.2. I had the same problem as @Wuyong in position mode, it was very stable with a strong wind. I changed mode and since then the position mode no longer works. I did not change firmware version. What’s the cause ?
Sorry for my late.
Actually a few days ago, I changed my quad’s firmware to v1.11.3. And I think it’s better than before.
But in position mode, my quad looks like wild horse. If I move my RC’s pitch to up, then quad tilt sharply.
As I said, my quad’s size is 1000mm. I don’t want to. But I don’t know how I change this situation.
My guess, this phenomenon is misleading like a unstable.
P.S.
Actually I tried to offboard control of this quad. In offboard mode, it looks good. I have no idea why offboard is good and position mode is strange. Here.
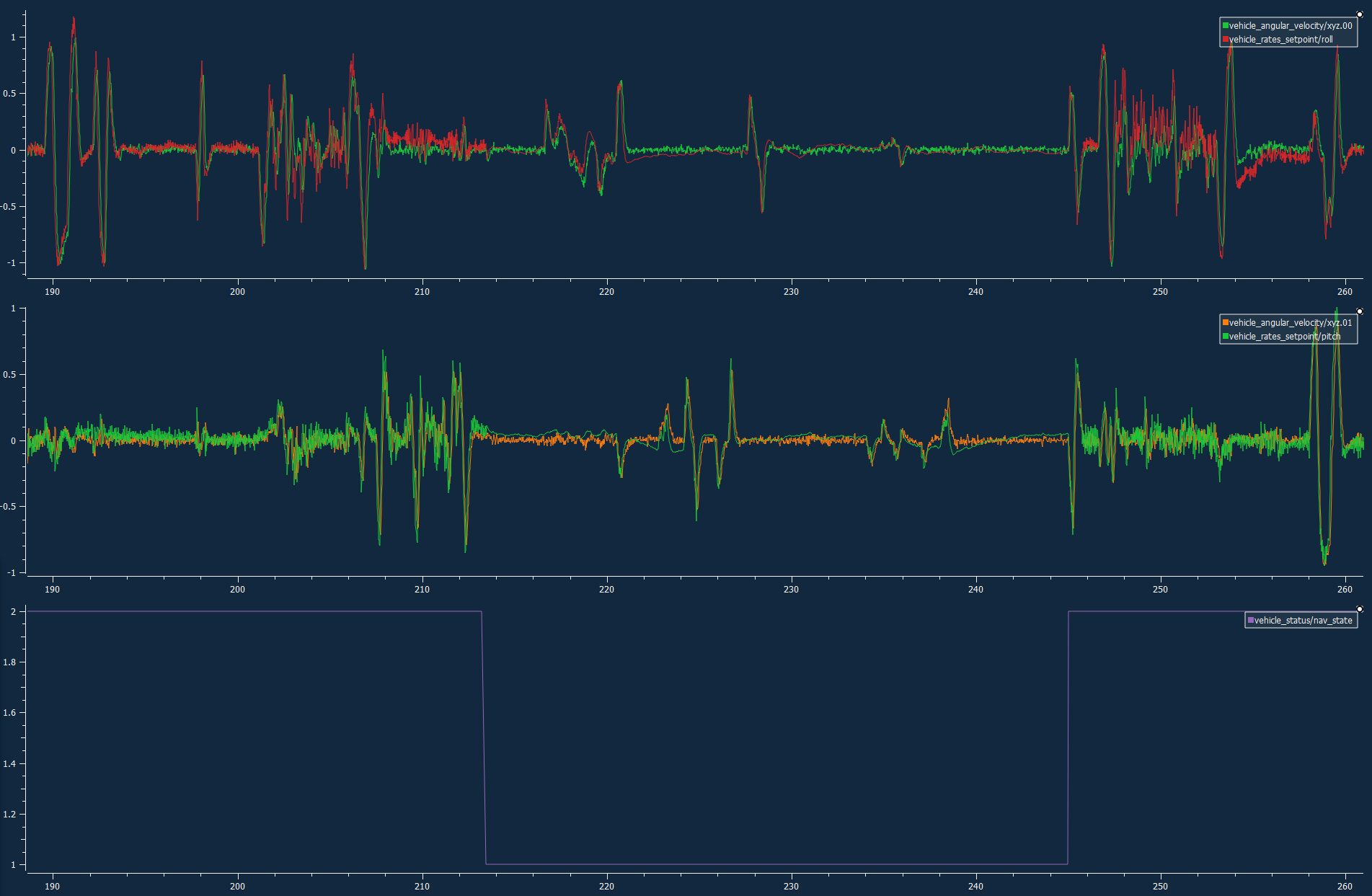
@wuyong.yi@regis_carreg Thanks for reporting! As far as I can see from the first log from @wuyong.yi there are quick oscillations through the attitude setpoints during horizontal position control in Position mode which are gone in Altitude mode:
For generally better flight performance I would double-check that the autopilot is mounted in a rigid way with only very slight isolation e.g. sticked with large surface douple sided tape to a frame plate or screwed down to the frame with orings under the screws. Also there should be no oscillating or rattling parts on the drone like lose screws or long thin GPS masts that can amplify oscillations.
If none of this helps there’s also the low pass filter for the accelerometer from which you can lower the cutoff frequency: Redirecting to latest version of document (main)
If set too low this might have negative side effects but is worth a try after testing velocity control tuning and checking the autopilot mount.
Please let me know how it goes or if you have further questions.
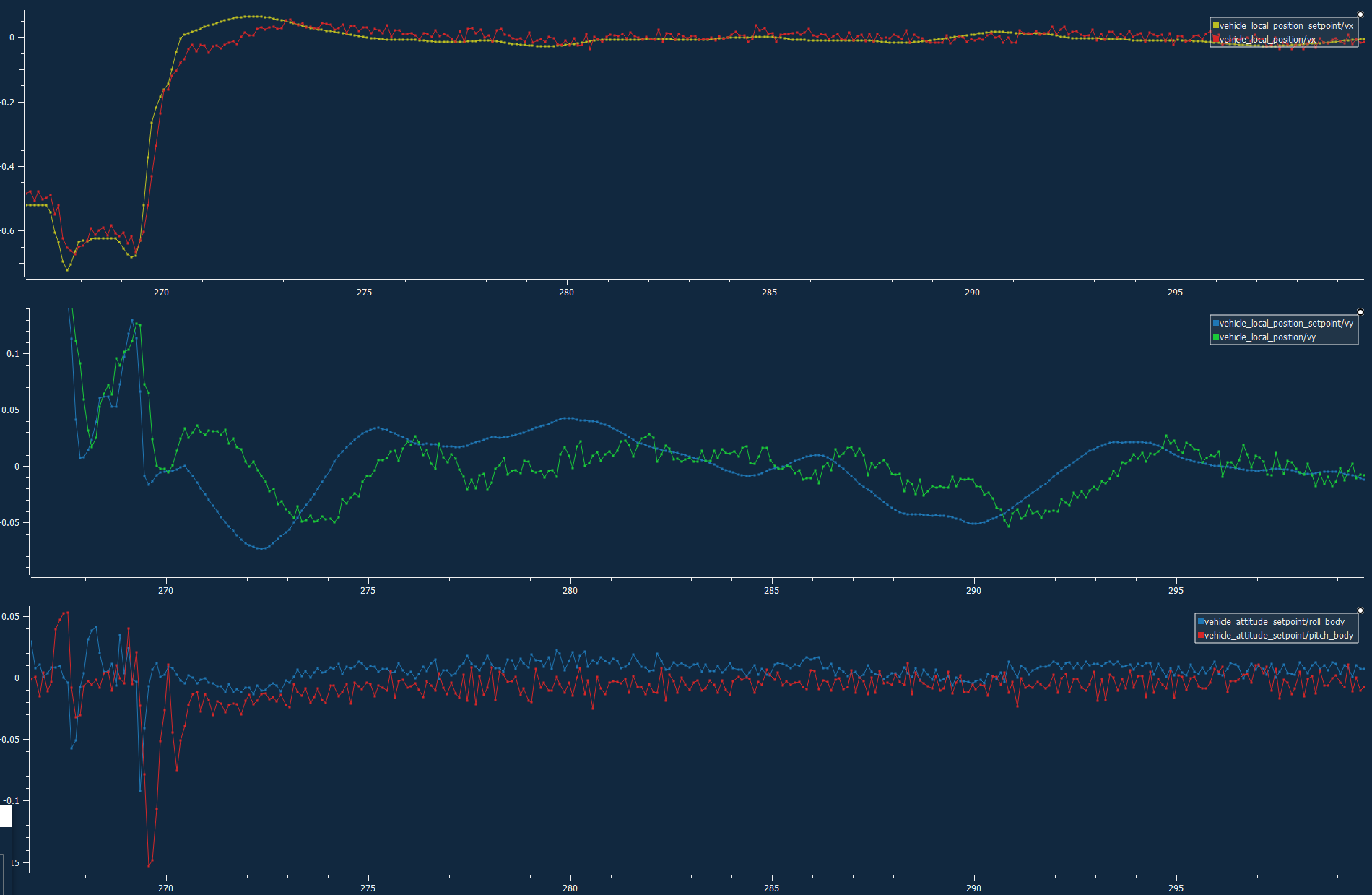
I also had a look at the second log provided with offboard mode flying and I do not seem any improvement over the flights in Position mode. The same oscillations are visible plus there are some smaller jumps in the x-axis position setpoints provided in offboard mode:
The similar issue (cannot switch to Position control) happens in our drone after updating to 1.13.3
There is our log and the detailed description of the problem .
Could you help us check the log?
We really appreciate your help and time
I solved it, thanks, updated by 5/19/2023