I am following along and so far so good, but I am wondering if I am increasing the possibility that I will run into issues later down the road if I continue with Garden instead of Fortress.
While following the PX4 Autopilot setup guide, I noticed an inconsistency regarding the recommended development environment. According to both the PX4 and Gazebo documentation, the suggested setup for Ubuntu 22.04 includes:
ROS 2 Humble
Gazebo Fortress
However, upon executing the package installation script via:
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
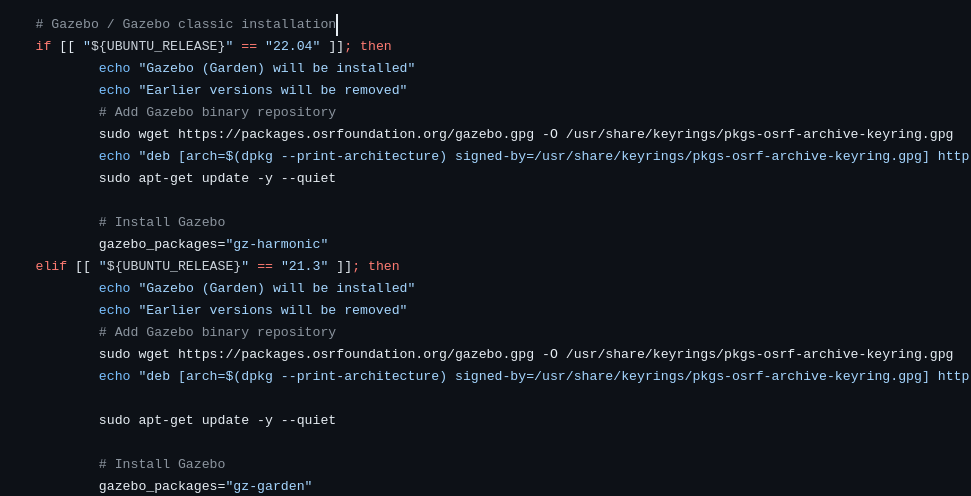
I observed that the script installs Gazebo Harmonic for Ubuntu 22.04 users. This contradicts the Gazebo wiki, which explicitly recommends Gazebo Fortress for this configuration (reference).
To ensure consistency and compatibility with both PX4 and Gazebo’s recommended setup, the installation script should be updated to install Gazebo Fortress instead of Harmonic for Ubuntu 22.04 users.
I think the reason why Garden is used is because of the changes from Fortress to Garden with all the gazebo commands. From Gazebo garden onward gazebo commands use “gz” while fortress (which was originally ignition) uses “ign”.
And Gazebo Garden is coming up to the end of its life (September 2024), so the next version (that will be around for a while) is Gazebo Harmonic.
If you really want ignition it looks like this repository would be the way to go: