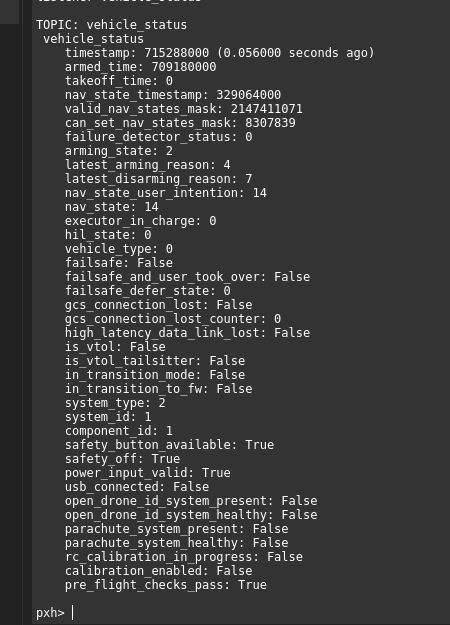
I updated the PX4 Autopilot and lost the vehicle status topic! Why is this happening?
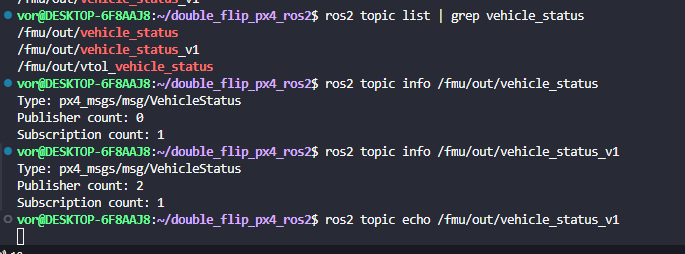
I can see the vehicle status in the QGroundControl MAVLink console, but in ROS 2, the /fmu/out/vehicle_status_v1 topic (which has two publishers) does not publish any messages.
Can someone help me restore the vehicle status topic in ROS 2?
INFO [uxrce_dds_client] synchronized with time offset 1748789165567357us
INFO [uxrce_dds_client] successfully created rt/fmu/out/register_ext_component_reply data writer, topic id: INFO [uxrce_dds_client] successfully created rt/fmu/out/arming_check_request data writer, topic id: 16
INFO [uxrce_dds_client] successfully created rt/fmu/out/mode_completed data writer, topic id: 155
INFO [uxrce_dds_client] successfully created rt/fmu/out/battery_status data writer, topic id: 19
INFO [uxrce_dds_client] successfully created rt/fmu/out/collision_constraints data writer, topic id: 26
INFO [uxrce_dds_client] successfully created rt/fmu/out/estimator_status_flags data writer, topic id: 83
INFO [uxrce_dds_client] successfully created rt/fmu/out/failsafe_flags data writer, topic id: 89
INFO [uxrce_dds_client] successfully created rt/fmu/out/manual_control_setpoint data writer, topic id: 146
INFO [uxrce_dds_client] successfully created rt/fmu/out/message_format_response data writer, topic id: 152
INFO [uxrce_dds_client] successfully created rt/fmu/out/position_setpoint_triplet data writer, topic id: 189INFO [uxrce_dds_client] successfully created rt/fmu/out/sensor_combined data writer, topic id: 222
INFO [uxrce_dds_client] successfully created rt/fmu/out/timesync_status data writer, topic id: 245
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_land_detected data writer, topic id: 273
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_attitude data writer, topic id: 260
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_control_mode data writer, topic id: 267
INFO [commander] Armed by external command
INFO [tone_alarm] arming warning
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_command_ack data writer, topic id: 264
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_global_position data writer, topic id: 268
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_gps_position data writer, topic id: 270
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_local_position data writer, topic id: 274
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_odometry data writer, topic id: 279
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_status_v1 data writer, topic id: 284
INFO [uxrce_dds_client] successfully created rt/fmu/out/airspeed_validated_v1 data writer, topic id: 13
INFO [uxrce_dds_client] successfully created rt/fmu/out/vtol_vehicle_status data writer, topic id: 293
INFO [uxrce_dds_client] successfully created rt/fmu/out/home_position data writer, topic id: 126