I believed that I have setup the communication bridge correctly between my companion computer and my flight controller because I am able to see the topics being published on the client:
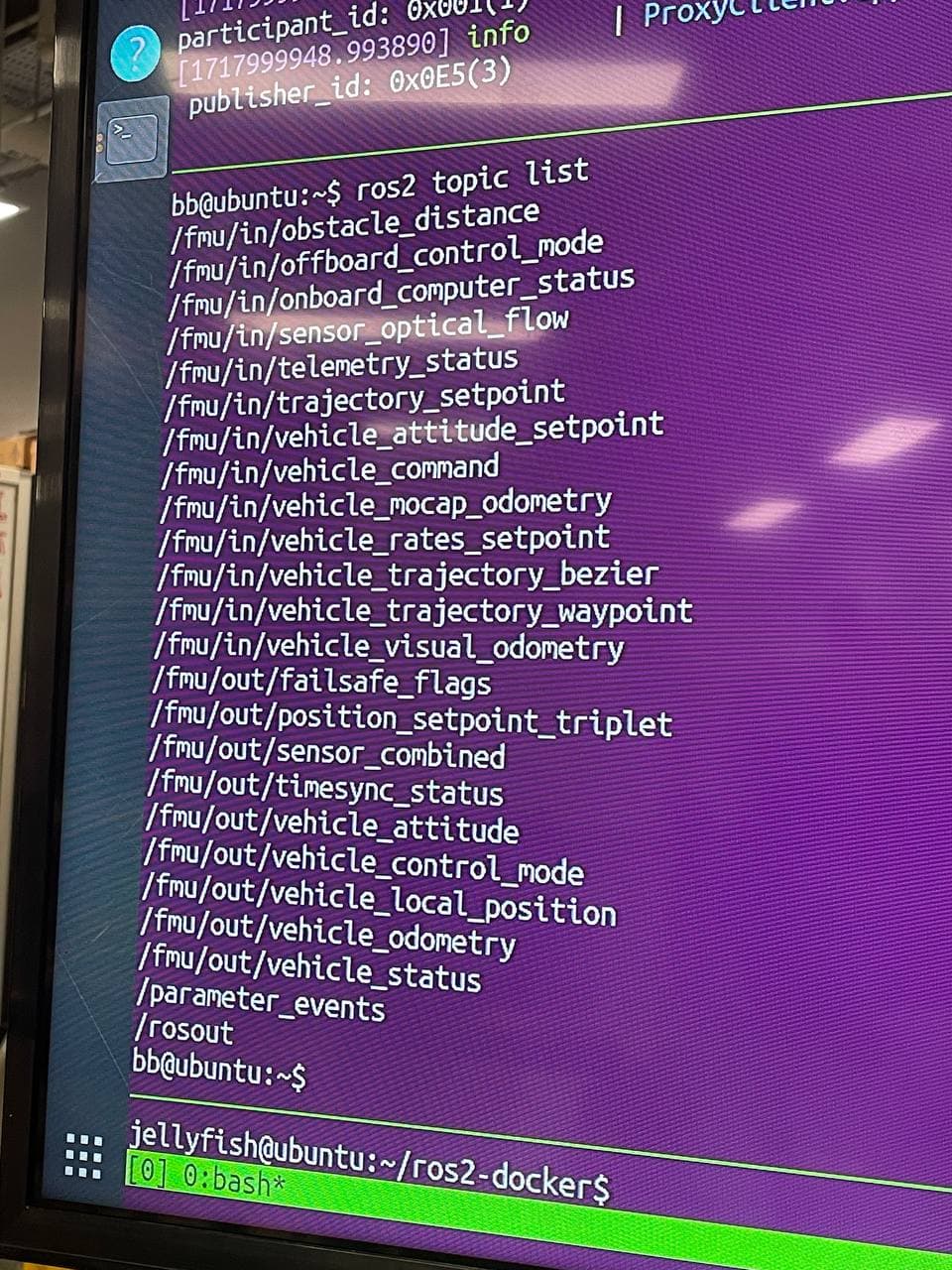
On the companion computer, I am able to ros2 topic list to show all the topics
However, some of the ros2 topics can be echo’ed such as /fmu/out/vehicle_odometry but some topics, namely /fmu/out/vehicle_local_position and /fmu/out/vehicle_status cannot be echoed at all
I fixed my issue it was a version mismatch between the flight controller firmware and the branch of px4_msgs i was using
The best way to debug would be to look at the topic definitions in the MAVLink console from QGC and compare it against the message definitions on the px4_msgs branch
Hello @monkescripts I have the same issue. I am also using the tag v1.14.3 from PX4 Autopilot and the branch release/1.14 from px4_msgs. Are you using that branch too?
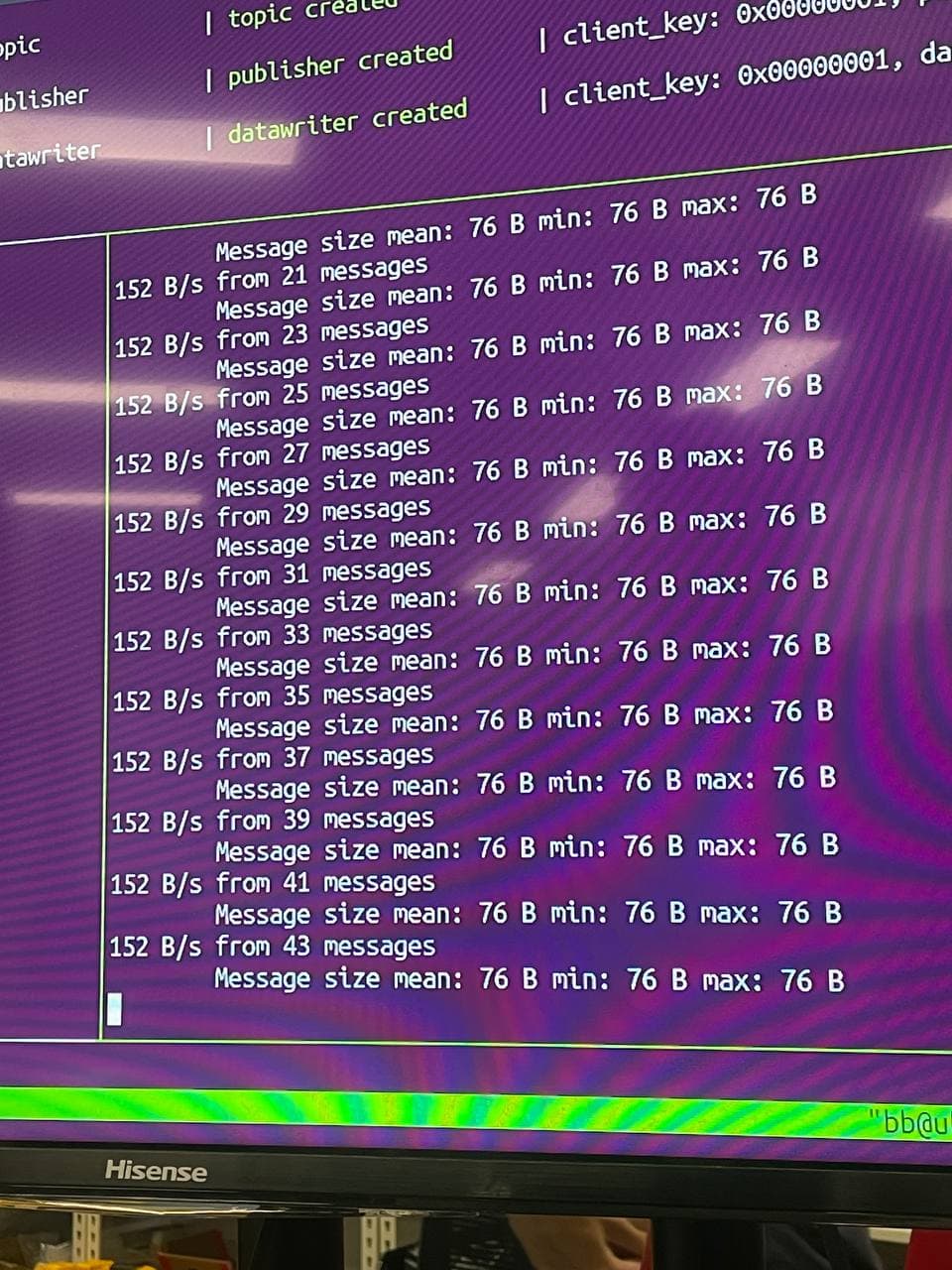
I am using the Isaac ROS packages, which involves using dockers where ROS2 Humble is running inside. I am able to connect through DDS, but I cannot see the topics. I assured the B/s in Mavlink console, same as you.
Btw I am cloning the repository with this command:
Hi @Jimi1811 I wanted to be safe so I directly copied the message definitions from the PX4-Autopilot repo under tag v1.14.3 rather than using px4_msgs release/1.14 branch
Thanks for the help @monkescripts it seemed like that worked! I copied the msg folder from release/1.14 into the px4_msgs I already had from cloning main, removed the old msg folder, and changed a few of the msg references in px4_ros_com/src/examples/listeners/vehicle_gps_position_listener.cpp with what they were called in release/1.14 after getting some errors from colcon build (latitude_deg → lat, longitude_deg → lon, etc.). After that I got a successful colcon build and have not faced any issues as of yet with receiving messages from the pixhawk.