Dronecode Test Team, Week 10 Report
PX4 Autopilot Flight Testing, by the Dronecode Test Team. Sponsored by Dronecode.
Summary
- 19 flights (Link to log archive)
- 9 PR’s assigned
- 0 issue reported this week.
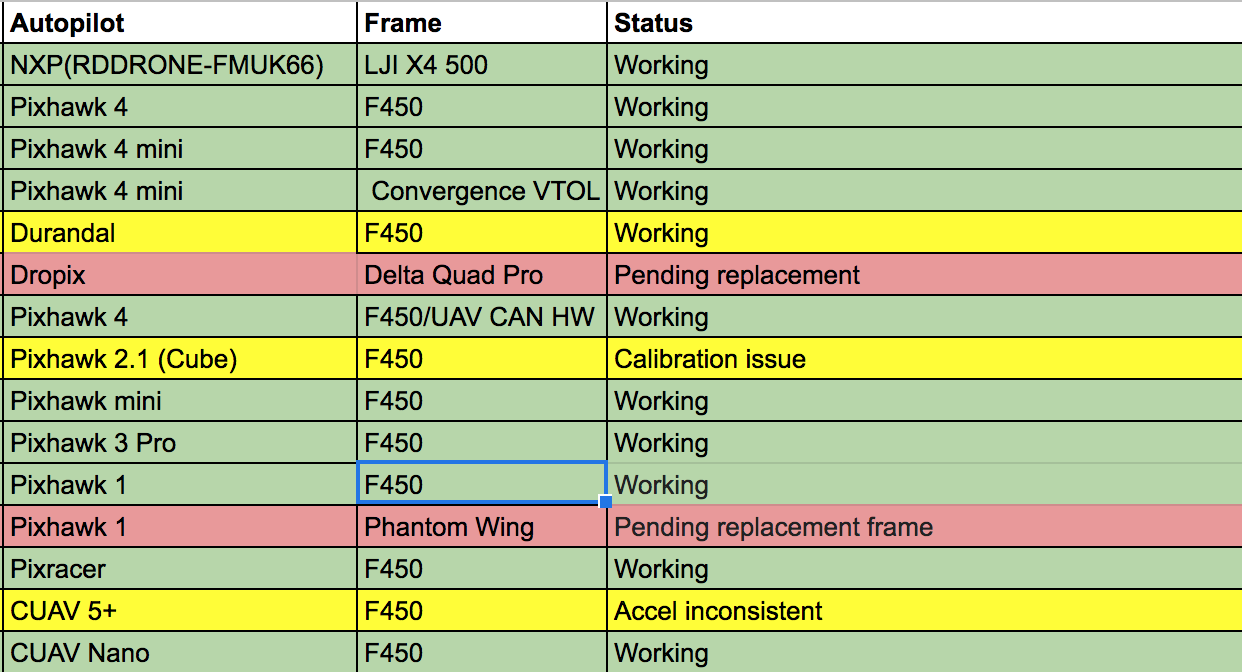
Vehicle Status
GitHub Pull Requests (Assigned / Tested)
-
ADC: replace ioctl with uorb message #14087
-
Added 2 IMU I2C drivers, SPI mode and bus speed option, fixed 1 I2C read bug, etc. #14168
-
sensors: move to uORB::Subscription and reduce CONFIG_NFILE_DESCRIPTORS 20 → 10 #14382
-
delete NAVIGATION_STATE_AUTO_RTGS (OBC datalink loss) #14307
-
px4_fmu-v5, px4_fmu-v5x, modalai_fv-v1 switch to new InvenSense IMU drivers (icm20602 & icm20689) #14356
-
mavlink delete MavlinkOrbSubscription and uORB delete unused orb_stat and last update timestamp
#14051 -
sensors: move baro aggregation to new sensors/vehicle_air_data
#14096 -
mc_pos_control: handle landed and takeoff setpoint limiting the same way #14326
-
Update ecl to add ability to recover from bad magnetic yaw
#14301
https://github.com/PX4/Firmware/pull/14087
https://github.com/PX4/Firmware/pull/14168
https://github.com/PX4/Firmware/pull/14382#
https://github.com/PX4/Firmware/pull/14307?email_token=AJMW5RM4UGUW7DAGQF4ORW3RGOBSNA5CNFSM4LCQJ732YY3PNVWWK3TUL52HS4DFVREXG43VMVBW63LNMVXHJKTDN5WW2ZLOORPWSZGOEOET7II
https://github.com/PX4/Firmware/pull/14326#event-3119660804
https://github.com/PX4/Firmware/pull/14301#event-3124068719