I follow the ROS2 User Guide step by step:https://docs.px4.io/main/en/ros2/
But when I Start a PX4 Gazebo simulation,the issue will come:
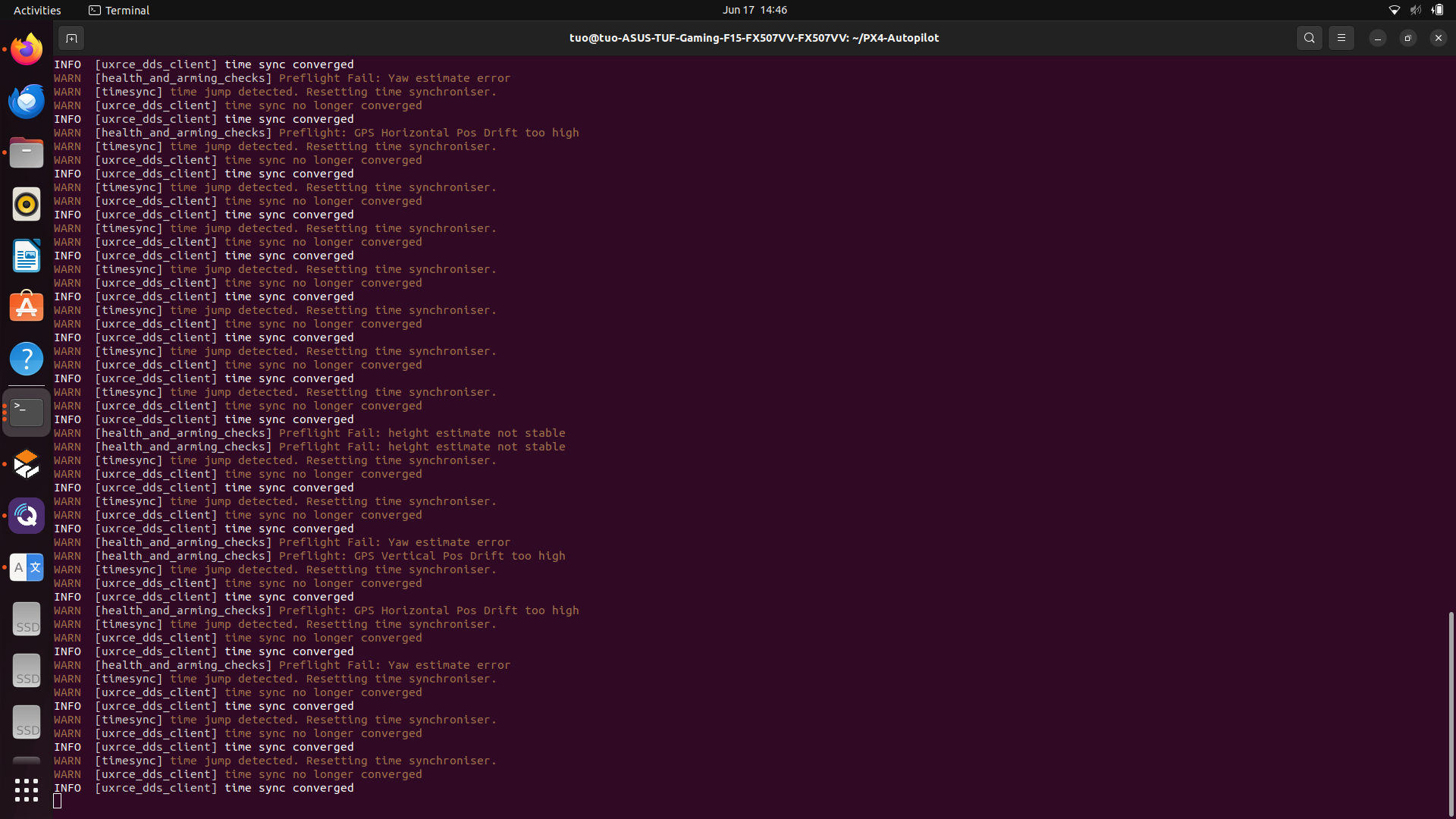
WARN [timesync] time jump detected. Resetting time synchroniser.
WARN [uxrce_dds_client] time sync no longer converged
INFO [uxrce_dds_client] time sync converged
If i don’t open the client, there is no problem with the PX4 Gazebo terminate
How can I solve this problem