Hi All, I’m new here. I have been following the docs for simulating the x500 and controlling it through uxrce dds, now i can receive datas and run the gazebo simulation but can’t arm the drone using the recommended git repo px4_ros_com. It says
Arming denied: Resolve system health failures first
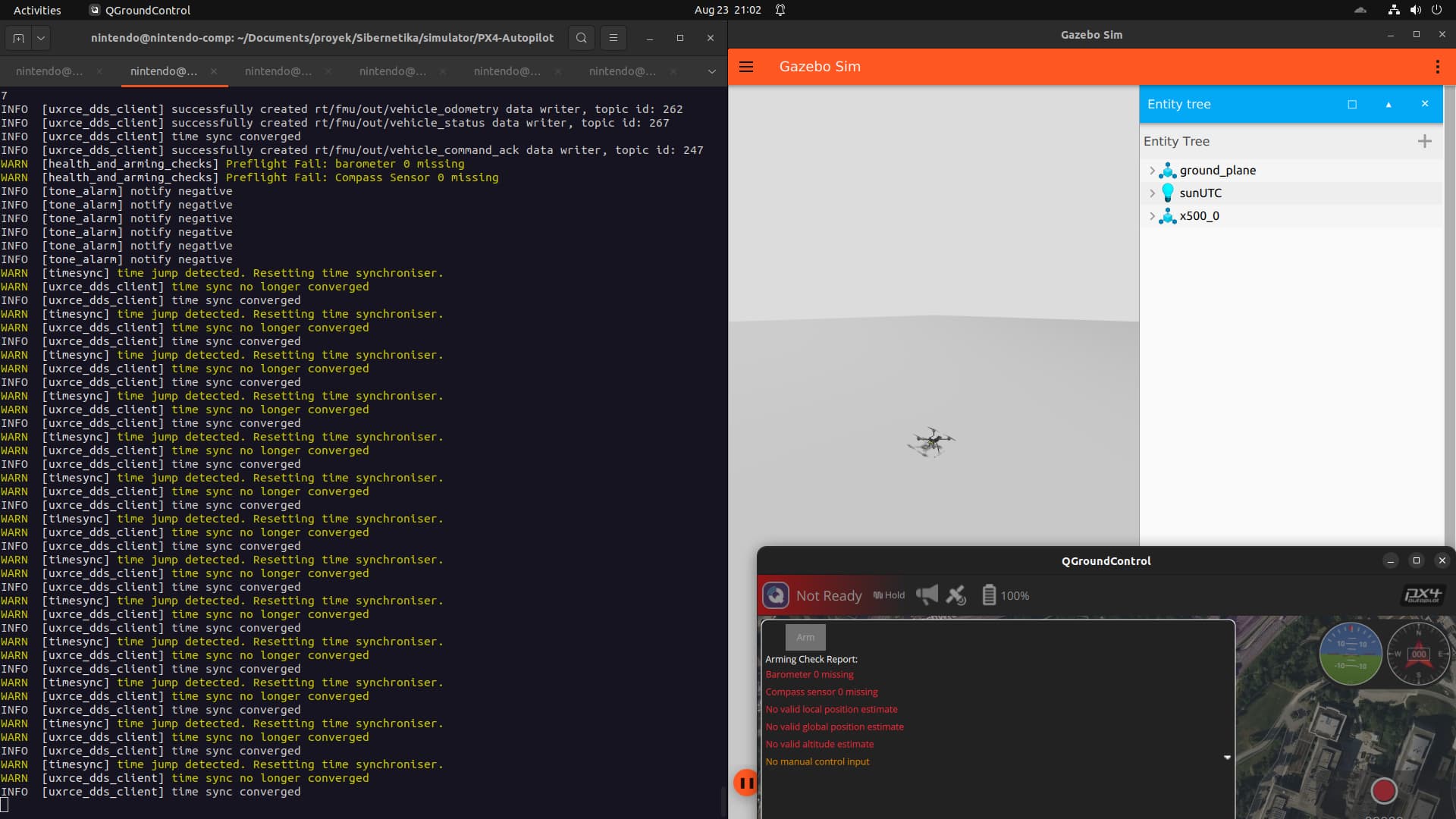
I even try to open QGroundControl and only found that i need to calibrate accelerometer and there is no barometer input. I’m confused how to proceed with that error since it’s simulation…
Here is some pic
Thanks!
Could you try downloading and running a ground control at the same time as your sim? It should auto connect to your sim and maybe it will provide more information
Thanks for replying!
I was also get confused when i opened the QGC since it reports more errors
I have checked the model.sdf of the x500 and confirmed that the sensor description is already included. But I suspect the model that i refer to is not actually what i use on the gazebo since the name on the log is a bit different (it’s x500_0 instead of just x500)
The model.sdf that i thought i use: PX4-gazebo-models/models/x500/model.sdf at 536305adee09b9ace391b16107e625cf7c6db7e7 · PX4/PX4-gazebo-models · GitHub
Initial log that i received:
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] startup script: /bin/sh etc/init.d-posix/rcS 0
INFO [init] found model autostart file as SYS_AUTOSTART=4001
INFO [param] selected parameter default file parameters.bson
INFO [param] importing from 'parameters.bson'
INFO [parameters] BSON document size 396 bytes, decoded 396 bytes (INT32:16, FLOAT:4)
INFO [param] selected parameter backup file parameters_backup.bson
INFO [dataman] data manager file './dataman' size is 7872608 bytes
INFO [init] Gazebo simulator
INFO [init] starting gazebo with world: /home/nintendo/Documents/proyek/Sibernetika/simulator/PX4-Autopilot/Tools/simulation/gz/worlds/default.sdf
WARN [init] PX4_GZ_MODEL_POSE not set, spawning at origin.
INFO [gz_bridge] world: default, model name: x500_0, simulation model: x500
INFO [gz_bridge] Requested Model Position: 0,0,0,0,0,0
INFO [gz_bridge] Model position z is less or equal 0.0, moving upwards
libEGL warning: egl: failed to create dri2 screen
libEGL warning: egl: failed to create dri2 screen
ERROR [gz_bridge] Service call timed out. Check GZ_SIM_RESOURCE_PATH is set correctly.
WARN [gz_bridge] Service call timed out as Gazebo has not been detected.
INFO [lockstep_scheduler] setting initial absolute time to 1456000 us
INFO [commander] LED: open /dev/led0 failed (22)
INFO [uxrce_dds_client] init UDP agent IP:127.0.0.1, port:8888
INFO [mavlink] mode: Normal, data rate: 4000000 B/s on udp port 18570 remote port 14550
INFO [mavlink] partner IP: 127.0.0.1
INFO [mavlink] mode: Onboard, data rate: 4000000 B/s on udp port 14580 remote port 14540
INFO [mavlink] mode: Onboard, data rate: 4000 B/s on udp port 14280 remote port 14030
INFO [mavlink] mode: Gimbal, data rate: 400000 B/s on udp port 13030 remote port 13280
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] ./log/2024-08-23/13_54_59.ulg
INFO [logger] Opened full log file: ./log/2024-08-23/13_54_59.ulg
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> WARN [health_and_arming_checks] Preflight Fail: barometer 0 missing
WARN [health_and_arming_checks] Preflight Fail: Compass Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: barometer 0 missing
WARN [health_and_arming_checks] Preflight Fail: Compass Sensor 0 missing
INFO [uxrce_dds_client] synchronized with time offset 1724421297531112us
INFO [uxrce_dds_client] successfully created rt/fmu/out/battery_status data writer, topic id: 19
INFO [uxrce_dds_client] successfully created rt/fmu/out/estimator_status_flags data writer, topic id: 82
INFO [uxrce_dds_client] successfully created rt/fmu/out/failsafe_flags data writer, topic id: 88
INFO [uxrce_dds_client] successfully created rt/fmu/out/manual_control_setpoint data writer, topic id: 137
INFO [uxrce_dds_client] successfully created rt/fmu/out/position_setpoint_triplet data writer, topic id: 177INFO [uxrce_dds_client] successfully created rt/fmu/out/sensor_combined data writer, topic id: 204
INFO [uxrce_dds_client] successfully created rt/fmu/out/timesync_status data writer, topic id: 227
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_land_detected data writer, topic id: 256
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_attitude data writer, topic id: 243
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_control_mode data writer, topic id: 250
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_local_position data writer, topic id: 257
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_odometry data writer, topic id: 262
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_status data writer, topic id: 267
INFO [uxrce_dds_client] time sync converged
INFO [uxrce_dds_client] successfully created rt/fmu/out/vehicle_command_ack data writer, topic id: 247
WARN [health_and_arming_checks] Preflight Fail: barometer 0 missing
WARN [health_and_arming_checks] Preflight Fail: Compass Sensor 0 missing
INFO [tone_alarm] notify negative
INFO [tone_alarm] notify negative
INFO [tone_alarm] notify negative
INFO [tone_alarm] notify negative
INFO [tone_alarm] notify negative
INFO [tone_alarm] notify negative
WARN [timesync] time jump detected. Resetting time synchroniser.
Edit: here is the flight record
https://review.px4.io/plot_app?log=f68138de-18ca-495e-bde6-b852d0a94906
I’m not changing anything and suddenly it works. Weird though
Only thing that i tried was exiting and restarting the gazebo
1 Like