Hi, I’m looking for guidance on how time sync with mavlink message are handle.
I’m running gazebo sitl with mavros and I’m getting alot of these messages:
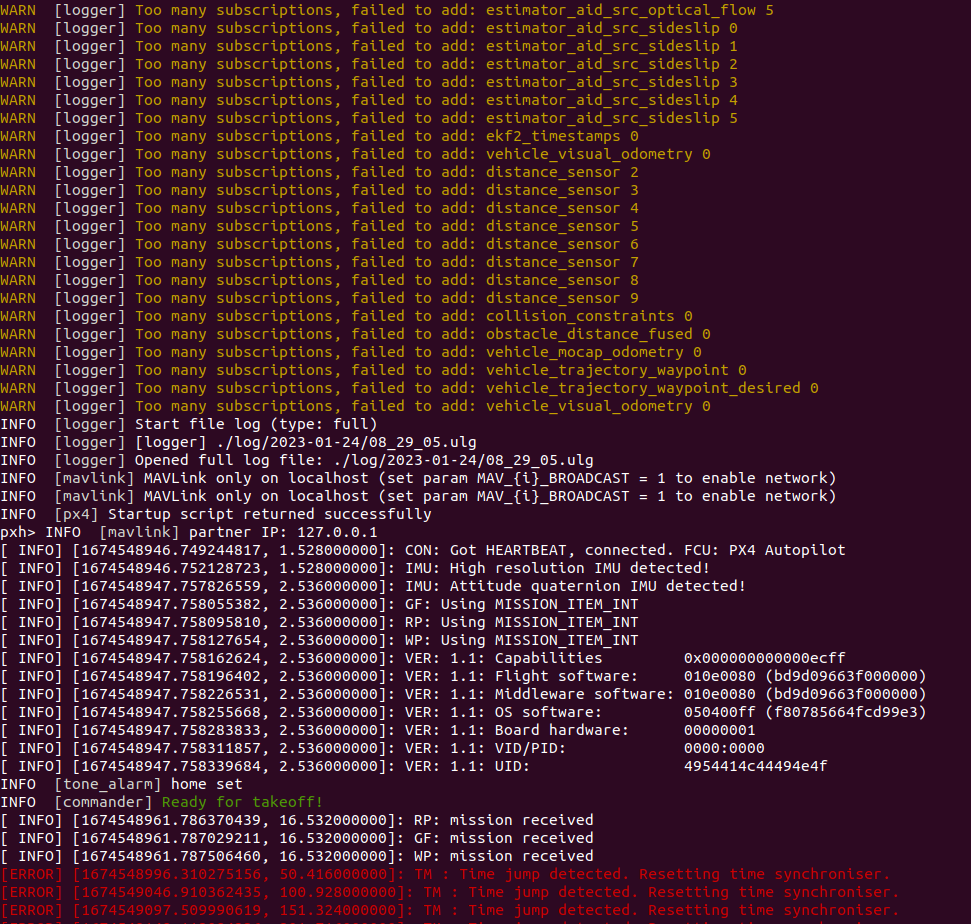
ERROR [mavlink] [timesync] Time jump detected. Resetting time synchroniser.
in the px4 console.
Yes this will definitively help!
Thanks for the help. I have the same issue when running
roslaunch px4 mavros_posix_sitl.launch
I used the latest PX4-autopilot
My platform is ubuntu 18.04 and python 3.6
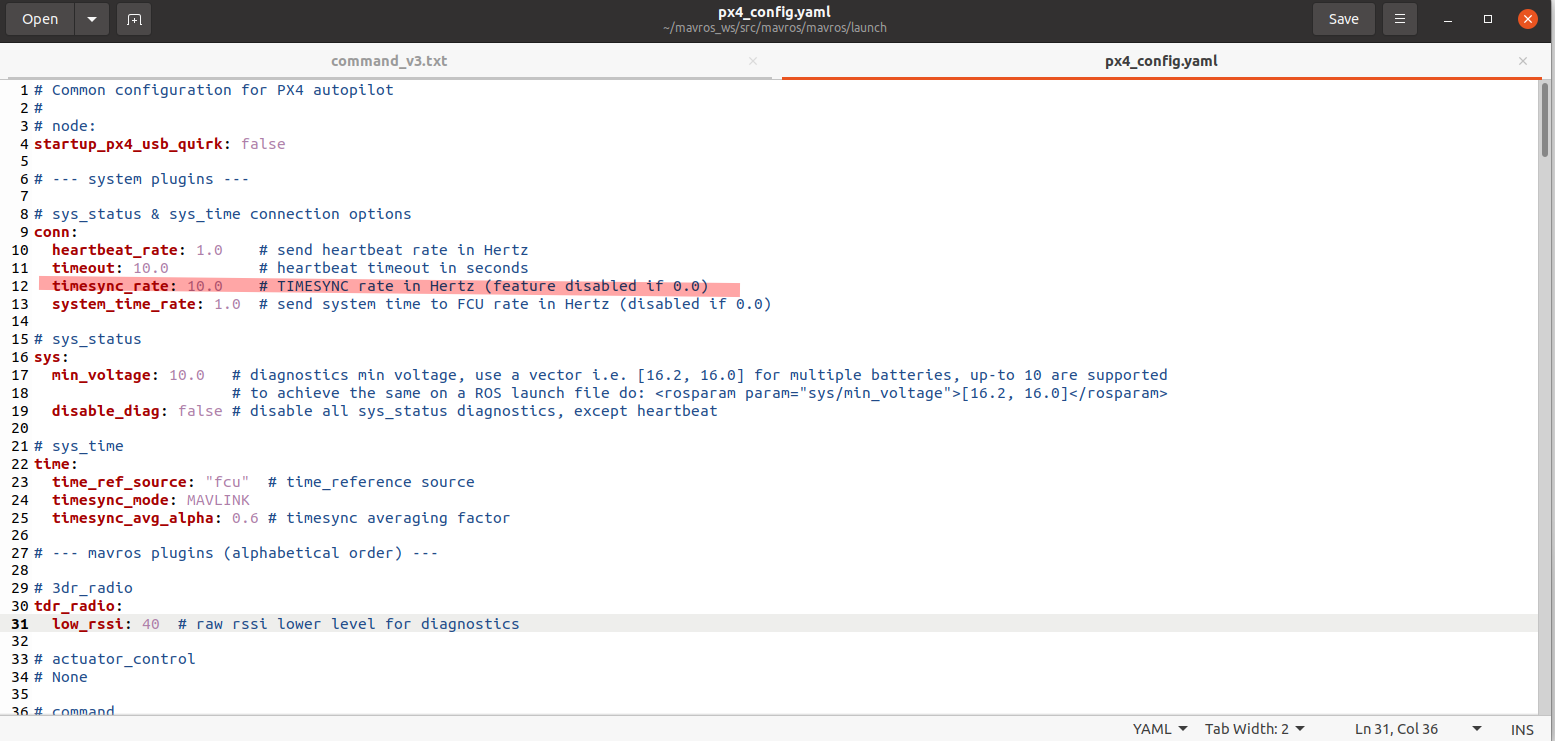
Go to mavros/mavrso/px4_config.yaml
Switch timesync_rate from 10 to 0.
catkin build
source devel/setup.bash