Hi there. I have problem with transition and cannot find solution for this.
In transition, after going horizontal i cannot start to use elevons to control. There are some movements on elevons up and down but it does not react for elevons and throttle stick movements.
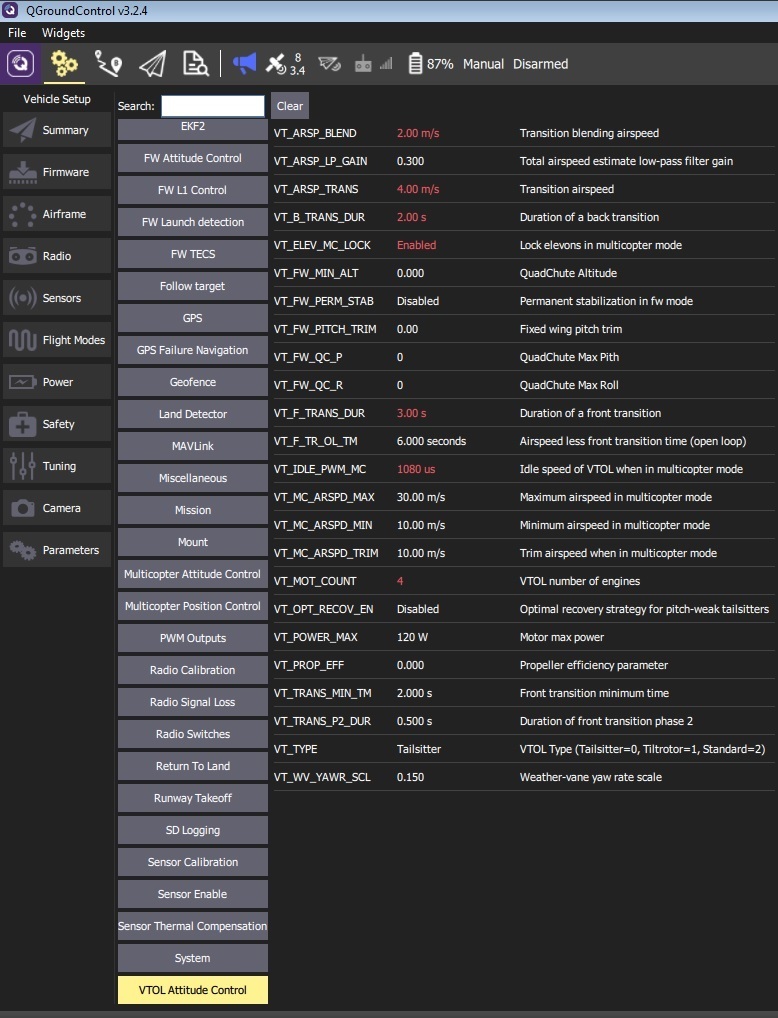
I is flying very well as copter, also starting transition very smoothly, but still i cannot fly it in plane mode. I attached my logs and screen of parameters.
I dont have pitot tube and did most of things like in manual. What I’m doing wrong?
https://logs.px4.io/plot_app?log=969aa6be-e8c1-46bb-8ec2-bf737c67fb5e